惯性测量单元IMU)是现代导航和运动跟踪系统的基本组件。
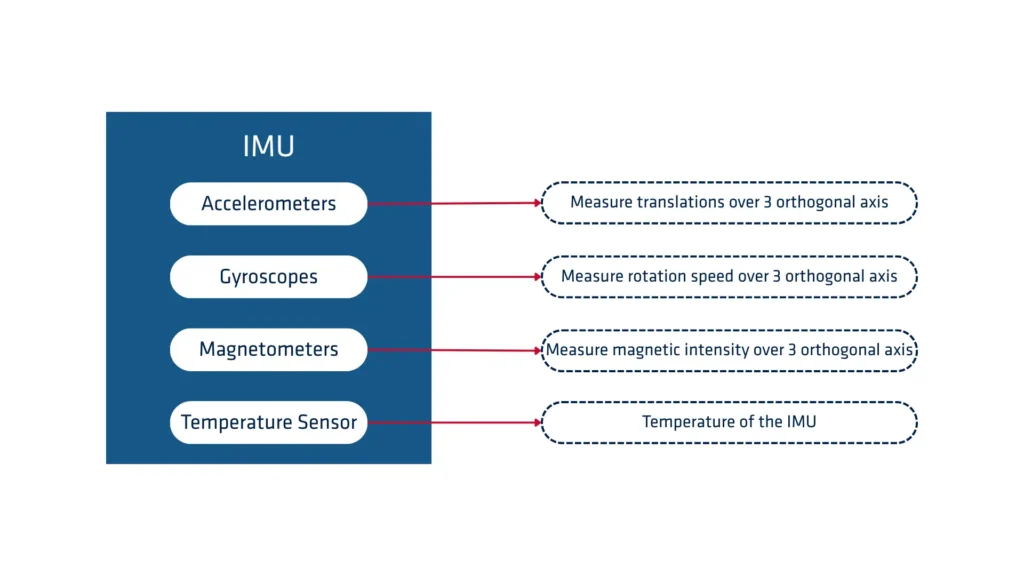
惯性测量单元IMU)是一种电子设备,它利用加速度计、陀螺仪和磁力计的组合来测量和报告物体的特定力、角速度,有时还测量和报告物体周围的磁场。
IMU 传感器有多种类型:基于 FOG(光纤陀螺仪)的IMU 、基于 RLGIMU (环形激光陀螺仪)的 IMU 以及基于 MEMS 技术Micro 机电系统)的IMU 。这种技术在确保性能的同时,还能降低成本和功耗。因此,基于 MEMS 的系统将高性能和超低功耗结合在一个较小的单元中。
系统以 1KHz 的频率输出原始数据,以满足要求严格的实时应用。
如何选择最佳IMU ?
在选择最适合您需求的IMU 时,必须考虑几个因素,以确保高精度、可靠性和性能。第一个因素是传感器精度,它直接影响测量精度。
高质量的 IMU 具有低偏差、低漂移和低噪声,可确保其提供的数据准确且长期稳定。校准也至关重要,因为校准良好的传感器可最大限度地减少误差累积,尤其是在动态环境中。
IMU 传感器的量程和分辨率也很重要。
功耗是另一个重要的考虑因素,尤其是对于无人机和自动驾驶汽车等电池IMU 。低功耗IMU 可延长运行时间并降低能源成本,使其在执行长时间任务时更加高效。
耐用性至关重要。专为恶劣环境(如国防或航空航天领域)设计的 IMU 必须足够坚固,能够承受温度波动、振动和冲击。此外,还要考虑外形尺寸和集成兼容性。
较小、较轻的 IMU 最适用于便携式设备或无人驾驶系统,而较坚固的应用则需要较大的系统。
最后,选择在提供高性能 IMU 方面具有良好记录的可信制造商,可确保您获得可靠的产品,满足您对精确和准确运动跟踪的需求。
