Motorcycles roll and lean acceleration analysis
Bike speed, lateral acceleration, and lean angle (moto roll).
“They like the compact size of the Ellipse-N and the impressive position robustness coupled with the CAN communication protocol and the good precision even in vibrating conditions.” | Ashish S., Director of Zen Microsystems

Tire testing
Tire quality and performance are crucial components of safe bike behavior and comfort. Two-wheeler manufacturers look closely at the tire performance when selecting their providers.
An Indian tire manufacturer company contacted Zen Microsystems to test the good adherence of their tires as well as the cornering capabilities in comparison with the market leader tires.
Zen Microsystems is a renowned Indian distributor for testing equipment. The company delivered a full tire analysis using the Ellipse-A Attitude and Heading Reference System (AHRS) from SBG Systems.
Test results
The test took place on a drive circuit. Zen Microsystems team installed the Ellipse-A connected to a CAN data logger with embedded GPS receiver.
The bike was equipped with Zen customer’s tires, and then with the market leader tires for comparison analysis. For both tests, the same testing equipment was used to sense speed, lateral acceleration, and the bike lean angle (bike roll).
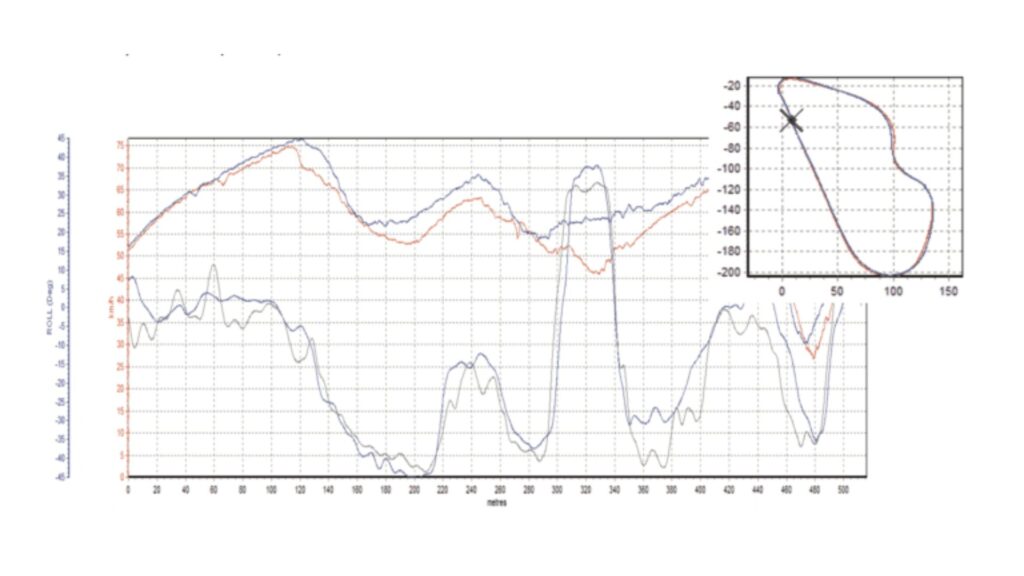
The analysis showed that at same curve (bend), with higher speed, Zen Microsystems’ client tires allowed higher bike roll during bends, more lateral accelerations which means a higher adherence of tires to the road (Higher Road Grip).
AHRS vs INS with embedded GNSS receiver
This complete analysis was determinant for the client who could prove the high quality of their products to the two-wheeler manufacturer.
The Ellipse-A AHRS used for the test is a highly robust miniature inertial sensor that provides roll, pitch, and magnetic heading thanks to the embedded Extended Kalman Filtering (EKF).
The AHRS is extensively calibrated in temperature and dynamics for bias, misalignment, etc. As space is limited on a bike for testing equipment, Ashish Samant, Director of Zen Microsystems recommended to his client the Ellipse-N, the all-in-one miniature INS/GNSS from SBG Systems.
The Ellipse-N is a miniature inertial navigation system which integrates a L1 GNSS receiver and fuses the position with inertial data for a smooth trajectory even during outages that could occur near trees, buildings, etc.
After this successful test, Zen Microsystems client chose the Ellipse-N.


Ellipse-N
Ellipse-N is a compact and high-performance RTK Inertial Navigation System (INS) with an integrated Dual band, Quad Constellations GNSS receiver. It provides roll, pitch, heading, and heave, as well as a centimetric GNSS position.
Ellipse-N sensor is best suited for dynamic environments, and harsh GNSS conditions, but can also operate in lower dynamic applications with a magnetic heading.

Ask a quotation for Ellipse-N
Do you have questions?
Welcome to our FAQ section! Here, you’ll find answers to the most usual questions about the applications we showcase. If you don’t find what you’re looking for, feel free to contact us directly!
Does INS accept inputs from external aiding sensors?
Inertial Navigation Systems from our company accept inputs from external aiding sensors, such as air data sensors, magnetometers, Odometers, DVL and other.
This integration makes the INS highly versatile and reliable, especially in GNSS-denied environments.
These external sensors enhance the overall performance and accuracy of the INS by providing complementary data.
What is the difference between IMU and INS?
The difference between an Inertial Measurement Unit (IMU) and an Inertial Navigation System (INS) lies in their functionality and complexity.
An IMU (inertial measuring unit) provides raw data on the vehicle’s linear acceleration and angular velocity, measured by accelerometers and gyroscopes. It supplies information on roll, pitch, yaw, and motion, but does not compute position or navigation data. The IMU is specifically designed to relay essential data about movement and orientation for external processing to determine position or velocity.
On the other hand, an INS (inertial navigation system) combines IMU data with advanced algorithms to calculate a vehicle’s position, velocity, and orientation over time. It incorporates navigation algorithms like Kalman filtering for sensor fusion and integration. An INS supplies real-time navigation data, including position, velocity, and orientation, without relying on external positioning systems like GNSS.
This navigation system is typically utilized in applications that require comprehensive navigation solutions, particularly in GNSS-denied environments, such as military UAVs, ships, and submarines.
What is GNSS vs GPS?
GNSS stands for Global Navigation Satellite System and GPS for Global Positioning System. These terms are often used interchangeably, but they refer to different concepts within satellite-based navigation systems.
GNSS is a collective term for all satellite navigation systems, while GPS refers specifically to the U.S. system. It includes multiple systems that provide more comprehensive global coverage, while GPS is just one of those systems.
You get improved accuracy and reliability with GNSS, by integrating data from multiple systems, whereas GPS alone might have limitations depending on satellite availability and environmental conditions.
GNSS represents the broader category of satellite navigation systems, including GPS and other systems, while GPS is a specific GNSS developed by the United States.
