American military cemeteries digitized for a solemn mission
“We chose the Ellipse-D because of its all-in-one GNSS and Inertial solution packaged in a compact and low-power consumption device.” | Matthew R. Staley, Military Engineering & Survey Support Scientist at the US Army Geospatial Center
The Army Geospatial Center (AGC) has applied innovation to help American Military cemetery visitors find their loved ones.
Traditional GPS survey methods and 3D mapping digitalization were integrated and mounted to a backpack specially built for the collection portion of this project.
A web interface that acts as the front end for the collected data provides a straightforward interface for visitors to find their relatives and access amplified information stored in the GIS database.
A Pilot Project for a Solemn Mission
Finding a particular headstone in an American National Cemetery often requires extensive and time consuming records reviews by administrators.
To help visitors easily find their loved ones, the Army Geospatial Center (AGC) in collaboration with the Arlington National Cemetery (ANC) has completed a pilot project including the Corozal (Panama) and Normandy (France) Cemeteries which, when combined, consist of more than 15,000 gravesites.
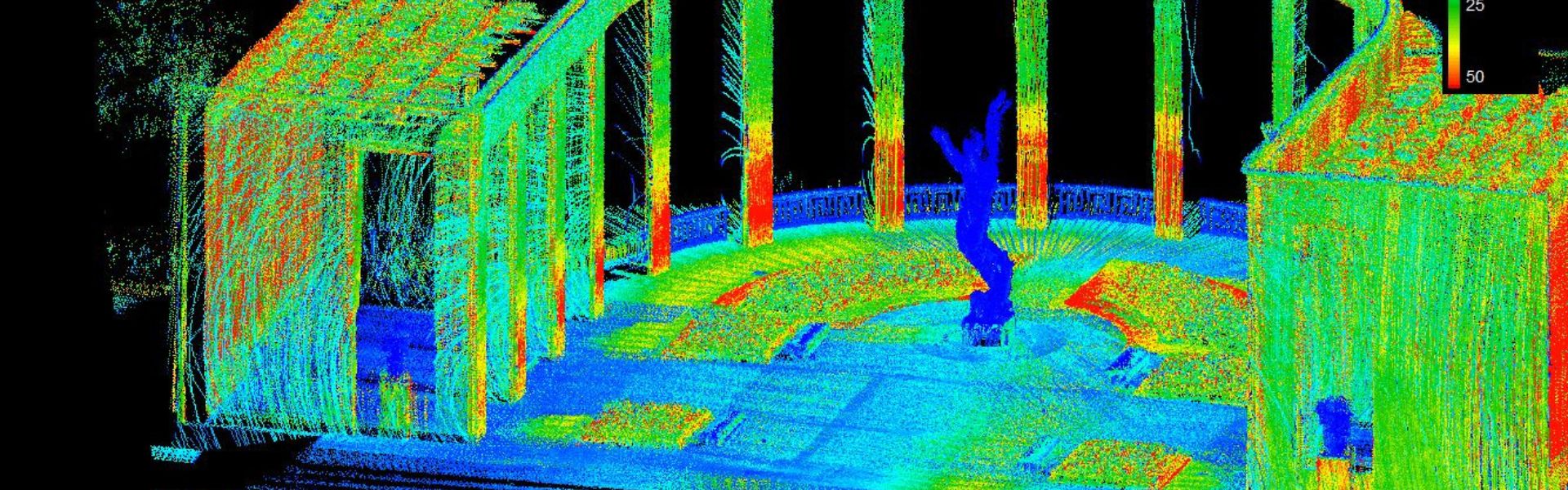
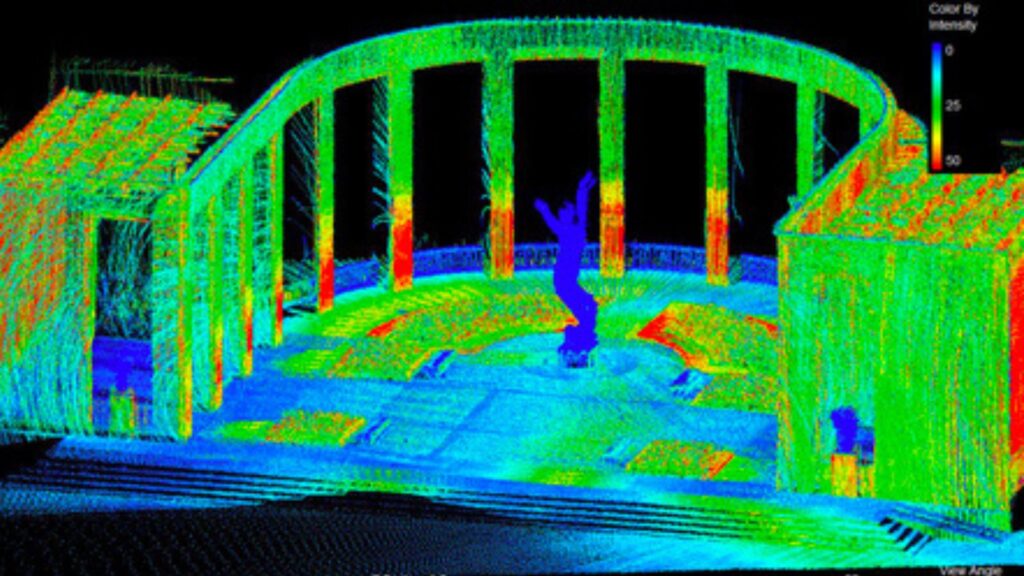
This massive project combines traditional surveying methods and modern technologies to create virtual models of both cemeteries.
The models include not only the underlying terrain and GPS coordinates for each headstone or memorial, but also features like roads, sidewalks, trees, curbs, gutters, monuments and many other man-made structures with an estimated accuracy of 10 cm (3.9 inches).
Geo-located photographs of the front and back of each headstone to aid in identification completed the collection solution.
The collected data was processed and integrated on the ENFIRE laptop. Thanks to these innovations, visitors can access cemetery data, search for loved ones or find historically significant gravesites by using the kiosks at the facilities that are running the ANC Explorer program.
Virtual visitors have identical functionality using the program on their home computer or mobile device.
Backpack-based Mobile Mapping Method
In order to map the cemeteries in their entirety with maximum details, Matthew R. Staley, Military Engineering and Survey Support Scientist at the US Army Geospatial Center, developed a backpack-based mobile mapping solution.
Employment of the equipment minimizes cost by decreasing collection times and by providing data in formats that are easy to manage. It leverages tools used by the U.S. Military Survey Services called ENFIRE and GPS-S.
“I coupled a LiDAR from Velodyne with the Ellipse-D Inertial Navigation System (INS) with embedded RTK GPS from SBG Systems” explains Matthew R. Staley.
He chose the Ellipse-D because of its all-in-one GNSS and Inertial solution packaged in a compact and low-power consumption device.
The INS/GNSS provides motion compensation and point cloud georeferencing. Moreover, a Real Time Kinematic (RTK) base station was installed in the cemetery for maximum accuracy. In addition, Hypack software managed the generated point cloud efficiently.
Adjusting the Magnetic Declination
One of the challenges was magnetometer calibration which is affected by the iron content of the location. Magnetic declination changing depends on the location; thus shipping the backpack from the U.S to France changed the magnetic declination.
The American National Oceanographic and Atmospheric Agency (NOAA) updates a global map of the Earth’s magnetic field every 5 years.
This map can be used, given a specific location and date, to determine the magnetic declination in that specific place.
SBG Systems embeds this map into their Inertial navigation systems, enabling automatic True North heading while using magnetometers.
Surveying around Trees
Another challenge was surveying in proximity to certain tree types that greatly affect satellite reception. Mr. Staley modified the data collection procedure to compensate for this issue and is continuing research into ways that will further mitigate the vegetation to reception effect.
Additionally, reducing the LiDAR range to obtain a better accuracy (+/- 5 cm overall) will be investigated as a way to mitigate yaw artifacts.
“I will test the Qinertia post-processing software from SBG soon, it could help in keeping a robust accuracy in all conditions” adds the U.S. Military Engineer.
Post Processing Kinematic (PPK) software such as Qinertia gives access to offline RTK corrections and enhances inertial navigation systems’ performance by post processing inertial data with raw GNSS observables using a computation called Forward-Backward-Merge.
Recently released, Qinertia software has been designed to be Intuitive and easy-to-use and has been independently characterized as the fastest post-processing software on the market.
What’s Next?
The primary mission was to capture data related to interments and to confirm the applicability of ENFIRE, GPS-S and LiDAR toolsets to the operation and management of the Arlington National Cemetery.
They realized the ability to audit grounds, update records, and assess construction using collected LiDAR data.
Moreover, they developed strategic plans that improved efficiency in their business processes.
Now that the pilot phase has concluded, the Army Geospatial Center is closely collaborating with Arlington National Cemetery and the American Battle Monuments Commission to assess the findings and determine a strategy for future enhancements and innovations.
Initial results proved that costs were minimized compared to previous efforts. Moreover, multiple communities realized an excellent overall return on investment.


Ellipse-D
The Ellipse-D is an inertial navigation system integrating a dual antenna and dual frequency RTK GNSS that is compatible with our Post-Processing software Qinertia.
Designed for robotic and geospatial applications, it can fuse Odometer input with Pulse or CAN OBDII for enhanced dead-reckoning accuracy.

Ask a quotation for Ellipse-D
Do you have questions?
Welcome to our FAQ section! Here, you’ll find answers to the most common questions about the applications we showcase. If you don’t find what you’re looking for, feel free to contact us directly!
Does INS accept inputs from external aiding sensors?
Inertial Navigation Systems from our company accept inputs from external aiding sensors, such as air data sensors, magnetometers, Odometers, DVL and other.
This integration makes the INS highly versatile and reliable, especially in GNSS-denied environments.
These external sensors enhance the overall performance and accuracy of the INS by providing complementary data.
What is the difference between AHRS and INS?
The main difference between an Attitude and Heading Reference System (AHRS) and an Inertial Navigation System (INS) lies in their functionality and the scope of the data they provide.
AHRS provides orientation information—specifically, the attitude (pitch, roll) and heading (yaw) of a vehicle or device. It typically uses a combination of sensors, including gyroscopes, accelerometers, and magnetometers, to calculate and stabilize the orientation. The AHRS outputs the angular position in three axes (pitch, roll, and yaw), allowing a system to understand its orientation in space. It is often used in aviation, UAVs, robotics, and marine systems to provide accurate attitude and heading data, which is critical for vehicle control and stabilization.
A INS not only provides orientation data (like an AHRS) but also tracks a vehicle’s position, velocity, and acceleration over time. It uses inertial sensors to estimate movement in 3D space without relying on external references like GNSS. It combines the sensors found in AHRS (gyroscopes, accelerometers) but may also include more advanced algorithms for position and velocity tracking, often integrating with external data like GNSS for enhanced accuracy.
In summary, AHRS focuses on orientation (attitude and heading), while INS provides a full suite of navigational data, including position, velocity, and orientation.
What is the difference between IMU and INS?
The difference between an Inertial Measurement Unit (IMU) and an Inertial Navigation System (INS) lies in their functionality and complexity.
An IMU (inertial measuring unit) provides raw data on the vehicle’s linear acceleration and angular velocity, measured by accelerometers and gyroscopes. It supplies information on roll, pitch, yaw, and motion, but does not compute position or navigation data. The IMU is specifically designed to relay essential data about movement and orientation for external processing to determine position or velocity.
On the other hand, an INS (inertial navigation system) combines IMU data with advanced algorithms to calculate a vehicle’s position, velocity, and orientation over time. It incorporates navigation algorithms like Kalman filtering for sensor fusion and integration. An INS supplies real-time navigation data, including position, velocity, and orientation, without relying on external positioning systems like GNSS.
This navigation system is typically utilized in applications that require comprehensive navigation solutions, particularly in GNSS-denied environments, such as military UAVs, ships, and submarines.
What is GNSS vs GPS?
GNSS stands for Global Navigation Satellite System and GPS for Global Positioning System. These terms are often used interchangeably, but they refer to different concepts within satellite-based navigation systems.
GNSS is a collective term for all satellite navigation systems, while GPS refers specifically to the U.S. system. It includes multiple systems that provide more comprehensive global coverage, while GPS is just one of those systems.
You get improved accuracy and reliability with GNSS, by integrating data from multiple systems, whereas GPS alone might have limitations depending on satellite availability and environmental conditions.
