低动态下性能更高
这些系统提高了精确度,降低了数据缺口的风险,对基础设施测绘、道路勘测和环境分析等应用至关重要。
移动测绘系统采用先进的全球导航卫星系统和惯性集成,可快速设置和快速初始化,最大限度地减少停机时间,实现快速数据采集。
在低动态环境中,如车辆在城区或室内缓慢行驶时,高性能惯性系统可保持精确的定位和定向数据。传统的 GPS 系统在这种条件下可能会很吃力,而与 GNSS 集成的 INS 系统则可确保连续、可靠的数据,即使在 GNSS 不支持的环境中也是如此。
通过确保性能的一致性,这些系统可生成精确的 3D 模型、地形图和地理空间产品,而不受移动速度或环境复杂性的影响。

内置同步的单一通信接口
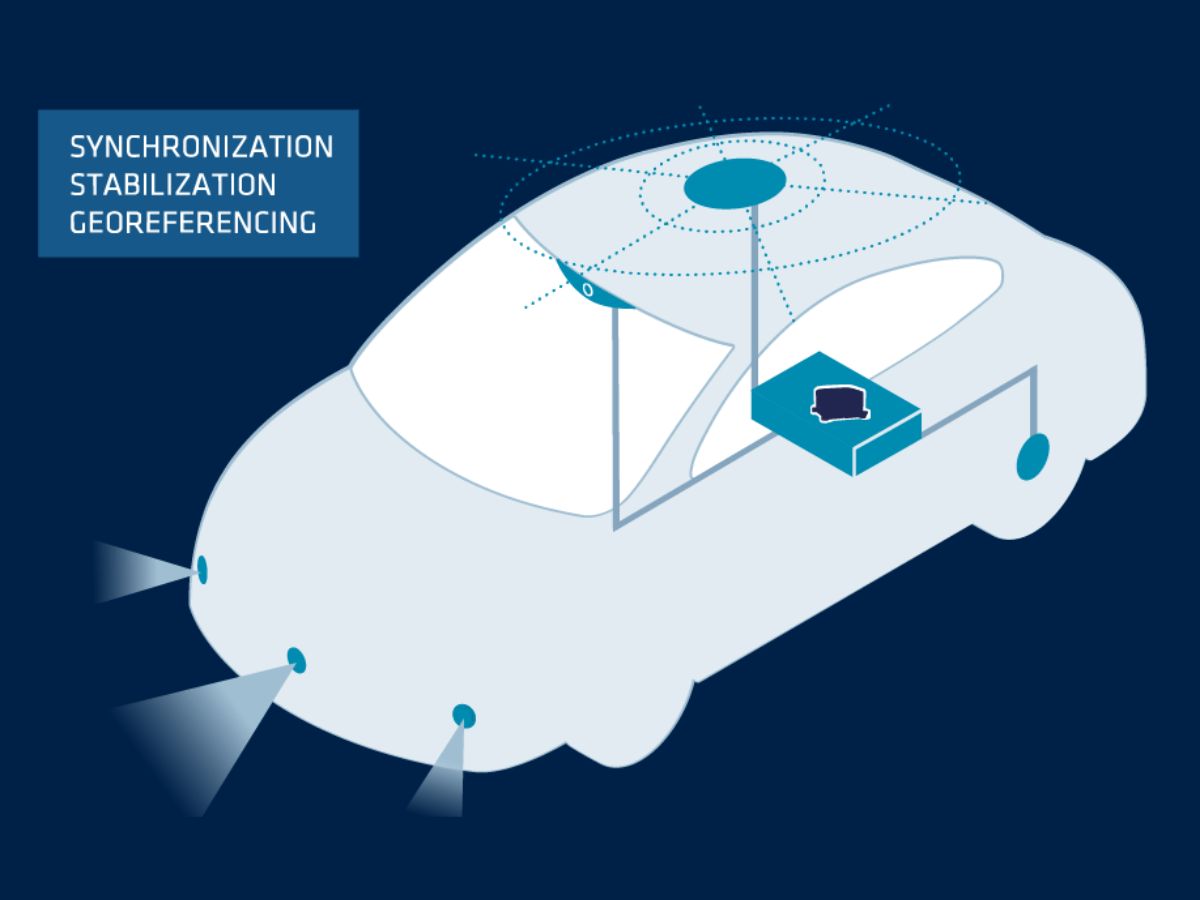
我们的惯性系统支持通过单一通信接口简化集成流程。INS 可以作为 GNSS 和 LiDAR 传感器数据的中心枢纽。通过使用 RS-232、以太网或 CAN 等标准通信协议,您可以将 INS 与您的 GNSS 接收机和移动 LiDAR 系统连接起来,从而最大限度地降低硬件复杂性,并避免对多个通信链路的需求。
我们的 INS 解决方案具有内置同步功能,可确保 GNSS、LiDAR 和惯性数据之间的无缝数据融合。
INS 可作为主时钟,同步所有传感器的时间戳,这对于 SLAM 操作至关重要。INS 具有实时时钟 (RTC) 功能以及处理 GNSS 定时和外部触发信号的能力,可确保 GNSS 和 LiDAR 数据正确对齐,以便进行精确的 SLAM 处理。
实时和后处理功能
实时数据采集使决策者能够进行现场评估,而后处理软件则确保最终输出尽可能准确。即使在卫星信号不可用或信号衰减的情况下,惯性系统也能保持稳定可靠的定位数据,从而极大地促进了这一过程。
配备惯性系统的移动测绘平台可灵活地进行数据采集和分析。操作员可以随时调整参数,确保他们的测绘项目达到所需的精度和准确度标准。
为了进一步完善,我们提供了功能强大的后处理软件 Qinertia,它可以通过离线处理提高 GNSS 和 INS 数据的准确性,从而增强 SLAM 的结果。

我们的移动制图解决方案
我们的惯性导航系统(INS)专为勘测市场设计,具有高性能和易用性的特点。这些系统以先进的惯性传感器为基础,集成了尖端算法和 GNSS 技术,可提供精确的导航和定位数据。我们的系统适应性强,可配置组件以满足特定应用需求

Ekinox-D

Apogee-D

Land-Air导航仪
制图应用手册
将我们的宣传册直接发送到您的收件箱!



他们谈论我们
聆听采用我们技术的创新者和客户的第一手资料。
他们的感言和成功案例说明了我们的传感器在实际自动驾驶汽车应用中的重大影响。
您有问题吗?
我们的常见问题部分涵盖了有关移动测绘系统的最常见问题,包括相关技术、最佳实践以及如何将我们的产品集成到您的解决方案中。
什么是 SLAM?
SLAM 是 "同步定位与绘图 "的缩写,是机器人学和计算机视觉领域的一种计算技术,用于绘制未知环境的地图,同时跟踪机器人在该环境中的位置。在无法使用全球导航卫星系统的情况下,例如在室内或密集的城市地区,这种方法尤其有用。
SLAM 系统可实时确定代理的位置和方向。这包括跟踪机器人或设备在环境中的移动。当代理移动时,SLAM 系统会绘制环境地图。这可以是二维或三维表示,捕捉周围环境的布局、障碍物和特征。
这些系统通常利用摄像头、激光雷达或惯性测量单元 (IMU) 等多个传感器来收集有关环境的数据。将这些数据结合起来,可以提高定位和绘图的准确性。
SLAM 算法处理输入的数据,不断更新地图和代理的位置。这涉及复杂的数学计算,包括过滤和优化技术。
什么是实时运动学?
实时运动学(RTK)是一种精确的卫星导航技术,用于提高从全球导航卫星系统(GNSS)测量中获得的位置数据的精度。它广泛应用于测量、农业和自动车辆导航等领域。
通过使用基站接收全球导航卫星系统信号并高精度计算其位置。然后将校正数据实时传输给一个或多个巡回接收器(巡回器)。漫游车利用这些数据调整其全球导航卫星系统读数,从而提高定位精度。
RTK 通过实时校正全球导航卫星系统信号,提供厘米级精度。这比标准 GNSS 定位要精确得多,后者的精度通常在几米之内。
来自基站的校正数据通过无线电、蜂窝网络或互联网等各种通信方式发送给漫游车。这种实时通信对于在动态运行期间保持精度至关重要。
什么是精确点定位?
精确点定位(PPP)是一种卫星导航技术,通过纠正卫星信号误差提供高精度定位。与通常依赖地面基准站(如 RTK)的传统 GNSS 方法不同,PPP 利用全球卫星数据和先进算法提供精确的位置信息。
PPP 可在世界任何地方工作,无需本地基准站。因此,它适合在缺乏地面基础设施的偏远或具有挑战性的环境中应用。通过使用精确的卫星轨道和时钟数据以及大气和多径效应校正,PPP 将常见的GNSS 误差降至最低,并可实现厘米级精度。
PPP 可用于事后处理定位,即事后分析收集到的数据,但它也可以提供实时定位解决方案。实时 PPP(RTPPP)的应用越来越广泛,用户可以实时接收校正并确定自己的位置。
什么是实时时钟?
实时时钟(RTC)是一种电子设备,即使在电源关闭的情况下也能记录当前时间和日期。实时时钟广泛应用于需要精确计时的应用中,具有多种关键功能。
首先,它们能精确地计算秒、分、小时、天、月和年,通常还能进行闰年和星期计算,以实现长期精确计时。RTC 运行功耗低,可使用备用电池,因此在停电时也能继续计时。它们还能为数据条目和日志提供时间戳,确保文档的准确性。
此外,RTC 还能触发预定操作,允许系统从低功耗状态唤醒或在指定时间执行任务。它们在同步多台设备、确保设备协同运行方面发挥着至关重要的作用。
从计算机、工业设备到物联网设备,RTC 是各种设备不可或缺的组成部分,可增强功能并确保在多种应用中进行可靠的时间管理。
