自动潜航器的姿态和航向精度 参考系统
我们的传感器专为无缝集成到自动潜航器AUV) 而设计,可确保连续收集和实时传输滚动、俯仰和磁性航向精度数据。
姿态和航向精度 精度参考系统(AHRS)对于确保自动潜航AUV在执行水下任务期间保持精确定位和航向精度 精度至关重要。我们开发的 AHRS 结合了加速计、陀螺仪和磁力计的数据,可实时确定AUV的姿态(俯仰、滚动和偏航)。这种连续的方位数据馈送对于在水下运行的自动潜水器至关重要,因为传统的全球导航卫星系统无法提供可靠的定位。
用于自动潜航器的外部辅助 INS 解决方案
我们的外部辅助 INS 解决方案可提供全面的滚动、俯仰、航向精度和偏摆数据,与外部定位解决方案配合使用时还可实现精确导航。
此外,我们的产品体积小巧、成本低廉,因此高性能惯性传感器在尺寸要求较高的场合也很适用。
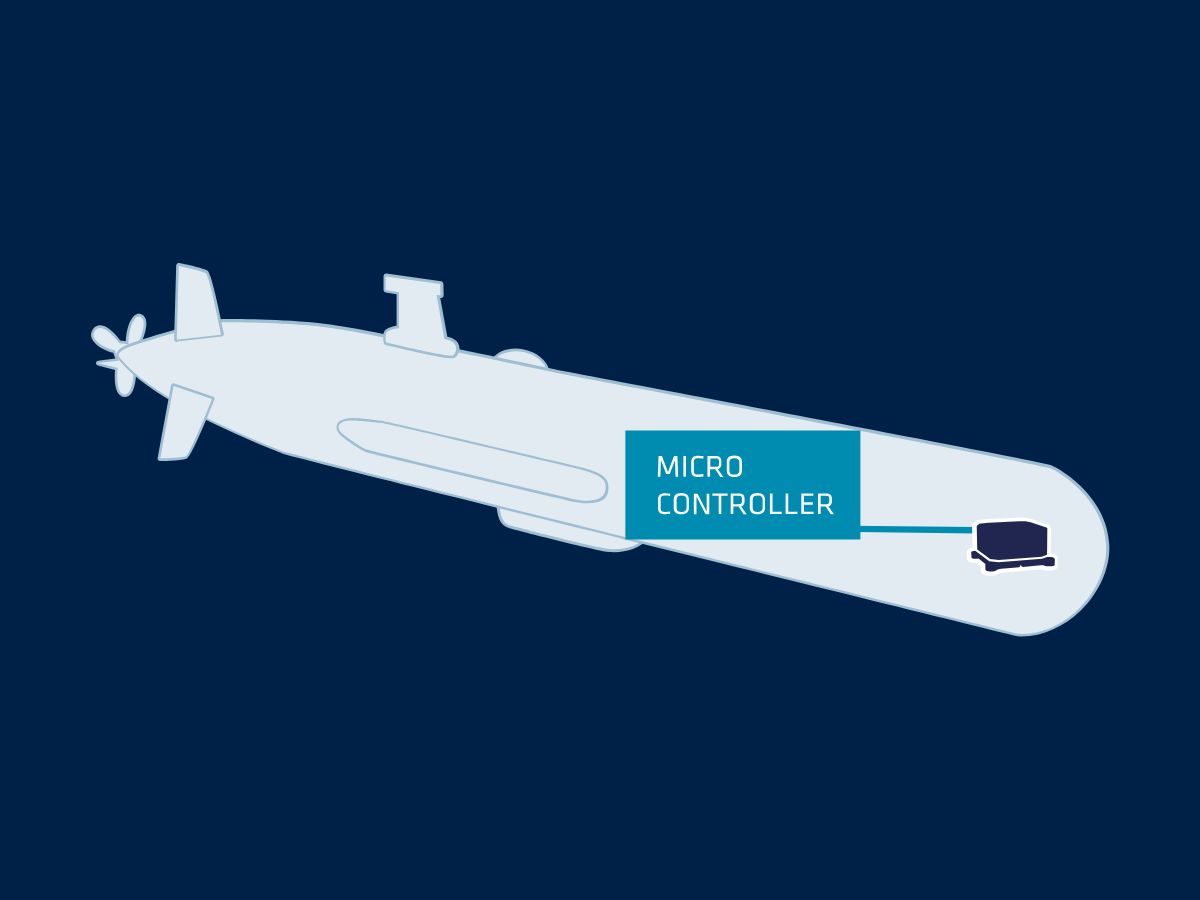
惯性导航系统 (INS) 在 AUV 中发挥着关键作用,可在 GNSS 不支持的环境中实现精确导航。我们的 INS 传感器结合了陀螺仪、加速度计(有时也包括磁力计)的数据,可提供有关飞行器速度、位置和方向的连续信息。即使在没有传统卫星导航信号的深海环境中,我们的 INS 解决方案也能让自动潜航器准确跟踪其路径。
AUV的运动和导航系统
在AUV 应用中,AHRS 可确保潜航器在湍急的水域中保持稳定,准确导航,并根据不断变化的水下环境调整运动。例如,用于海底测绘的自动潜航器依靠精确的姿态数据为声纳或其他传感器维持一个稳定的平台。如果没有准确的姿态信息,潜水器的数据收集工作就会受到影响,从而导致测绘或检查任务出现错误。
对于水下勘测任务而言,INS 尤为重要。它可以帮助自动潜航器计算其随时间变化的轨迹,使操作人员能够执行精确的测绘或监测任务。INS 能够提供位置和运动的实时反馈,对于在复杂的水下地形中导航以及避开水下结构、残骸或自然构造等障碍物至关重要。

我们为自动潜航器提供的解决方案
我们的惯性解决方案专为在水下环境中实现最高精度而设计,可为您的自动潜航器提供装备。无论是勘探、研究还是防御,我们的系统都能提供卓越的精度和耐用性,确保每次任务都能取得成功。

Pulse-40

Ellipse-A

Ellipse-E

Ellipse-N

Ellipse-D

Ekinox Micro
自动驾驶汽车手册
将我们的宣传册直接发送到您的收件箱!



他们谈论我们
聆听采用我们技术的创新者和客户的第一手资料。
他们的感言和成功案例说明了我们的传感器在实际自动驾驶汽车应用中的重大影响。
您有问题吗?
我们的常见问题部分涵盖了有关移动测绘系统的最常见问题,包括相关技术、最佳实践以及如何将我们的产品集成到您的解决方案中。
AUV 和ROV 有什么区别?
自主潜水器AUV)与遥控潜水器ROV)的主要区别在于它们的控制和操作。自动潜航器是自主的,在没有人类直接操作的情况下,按照预先设定的程序执行特定任务。AUV 由电池供电,不受约束,行动自由,是海底测绘和环境监测等任务的理想选择。
自动潜航器由于具有自主性,可以覆盖广阔的距离。而遥控潜水器则由操作人员通过系绳将其与船舶或平台连接起来进行控制。这种系绳提供动力和通信,但限制了它们的航程,因此 ROV 是需要实时控制的水下检查和维修的理想选择。
