SBG Inertial Navigation Systems in Hydrographic Applications

© MacArtney Germany GmbH
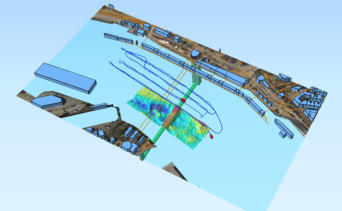
Motion Sensor Calibration Field:
3D Model
3D Visualization of the survey area for the motion
sensor calibration, based on motion and trajectory data
of the SBG Horizon. The interface includes the survey
line, the computed bathymetry, quality indicating layers
and topographic features.
The
SBG
Inertial
Navigation
Systems
have
been
tested
during
a
three
days
lasting
hydrographic
survey
in
the
Hamburg
(Germany)
port
area.
SBG
Systems
and
MacArtney
Germany
GmbH
equipped
a
survey
vessel
with
a
complete
Multibeam
Echosounder
survey
configuration
and
conducted
various
tests
to
proof
the
performance
of
the
SBG
Inertial
Systems
in
conditioning
environments.
The
sensors
tested
were
the
Horizon
,
Apogee
,
Ekinox
(Navsight
Marine
Series)
and
Ellipse
.
Raw
INS
data
were
logged
in
real-time
and
merged
with
MBES
data
from
the
Reson
SeaBat
725
within
the
acquisition
software
Teledyne
PDS
.
Hydrographic
data
were
post-processed
and
filtered
with
BeamWorx
AutoClean
,
INS
data
have
been
processed
using
SBG
Qinertia
.
3D
Models
and
interactive
webmaps,
including
each
INS
based
bathymetric
computation
and
related
quality
layers,
have
been
created
with
GIS
software
and
layouted
with
JavaScript.
The
evaluation
of
the
results
includes
the
calibration
results
and
bathymetric
data,
trajectories
and
quality
indicators,
focusing
on
the
motion
and
positioning
performance
of
the
INS
in
different
scenarios
like
underbridge
and
channel
surveys
(GNSS
outages)
or
facing
strong
swells.
Also
the
improvement
of
survey
results
due
to
loosely
and
tightly
coupled
post-processing
of
raw
INS
logs
will
be
presented.
Results
of
the
testing
scenarios are listed below:

Calibration Reports/ Offsets
Calibration reports and advised mounting angles for
each SBG Inertial System. Reports are derived from the
Patching software BeamworX Autopatch. Offsets for
each sensor for the vessel configuration and the sensor
setup have been measured during an alignment survey
and evaluated using Cremer Caplan.








Test of the new PPP processing mode in Qinertia.
Bathymetric surfaces and quality layers have been
computed on basis of RTK (real-time) and PPP (post-
processing) INS solutions.
Inertial Tests:
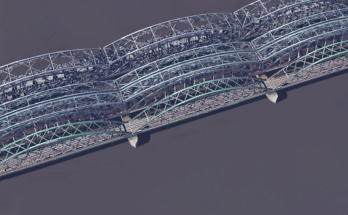
Elbbrücken Webmap
Webmap of the river surface of the Elbe along the pillars
of the Elbbrücken and bathymetric quality measures
plus trajectories. Reference for the Difference surfaces is
a tightly coupled Horizon solution. The compare sensor
is a high-end fiber-optic system.

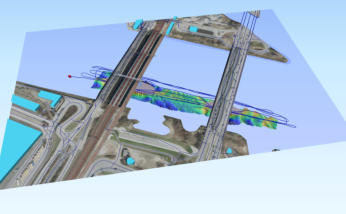
Elbbrücken 3D Model
3D Visualization of the Bathymetry below the Elbbrücken
in Hamburg, based on trajectory data of the SBG
Horizon. The interface includes the survey line, the
computed bathymetry, quality indicating layers and
topographic features.
Speicherstadt Webamp
Webmap of the river surface of the Elbe along the
channels of the Speicherstadt and bathymetric quality
measures plus trajectories. Reference for the Difference
surfaces is a tightly coupled Horizon solution. The
compare sensor is a high-end fibre-optic system.
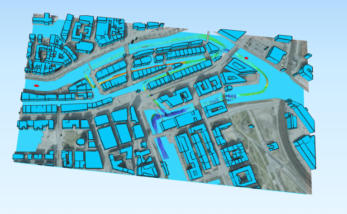
Speicherstadt 3D Model
3D Visualization of the Bathymetry along the channels of
the Speicherstadt, based on trajectory data of the SBG
Horizon. The interface includes the survey line, the
computed bathymetry, quality indicating layers and
topographic features.

Hamburg Docks Webmap
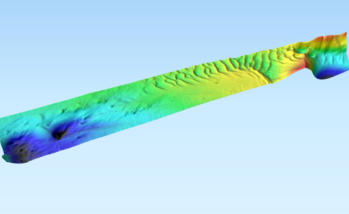
Hamburg Docks 3D Model
3D Visualization of the Bathymetry of the Elbe next to the
Docks of the Hamburg Harbour, based on trajectory data
of the SBG Horizon. The interface includes the survey
line, the computed bathymetry, quality indicating layers
and topographic features.

Webmap of the river surface of the Elbe next to the
Docks of the Hamburg Harbour and bathymetric quality
measures plus trajectory. During this test dynamic
motion patterns, due to swells induced by ships passing
the vessel, have been recorded. Reference for the
Difference surfaces is a real-time fiber-optic sensor
solution.
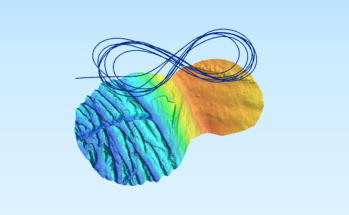
Motion Tests:
8 Figure/ Heading Webmap
Webmap of the river surface of the Elbe during an „8“
Figure manoeuvre and bathymetric quality measures
plus trajectory. This manoeuvre is conditioning
especially regarding the heading performance of the
sensors. Reference for the Difference surfaces is a real-
time fiber-optic sensor solution.

8 Figure/ Heading 3D Model
3D Visualization of the Bathymetry of the Elbe during an
„8“ Figure manoeuvre, based on trajectory data of the
SBG Horizon. The interface includes the survey line, the
computed bathymetry, quality indicating layers and
topographic features.
Underbridge 180° Turn Webmap
Webmap of the river surface of the Elbe along the
Elbbrücken and bathymetric quality measures plus
trajectories. The survey contains a full 180° turn during a
complete RTK outage. Reference for the Difference
surfaces and the compare system is a post-processed
fiber-optic sensor solution.
Precise Point Positioning Test


