Higher performance under low dynamics
Mobile mapping systems with integrated IMUs provide real-time data, delivering critical insights into environmental dynamics.
These systems enhance accuracy and reduce the risk of data gaps, making them essential for applications like infrastructure mapping, road surveys, and environmental analysis.
With advanced GNSS and inertial integration, mobile mapping systems offer quick setup and rapid initialization, minimizing downtime and enabling fast data collection. This is particularly valuable in time-sensitive scenarios, such as infrastructure mobile surveys or emergency response mapping, where rapid deployment is crucial.
In low dynamic environments, such as vehicles moving slowly through urban areas or indoors, high-performance inertial systems maintain precise positioning and orientation data. While traditional GPS systems may struggle in such conditions, an INS integrated with GNSS ensures continuous, reliable data, even in GNSS-denied environments.
By ensuring consistent performance, these systems produce accurate 3D models, topographic maps, and geospatial products, regardless of movement speed or environmental complexity.

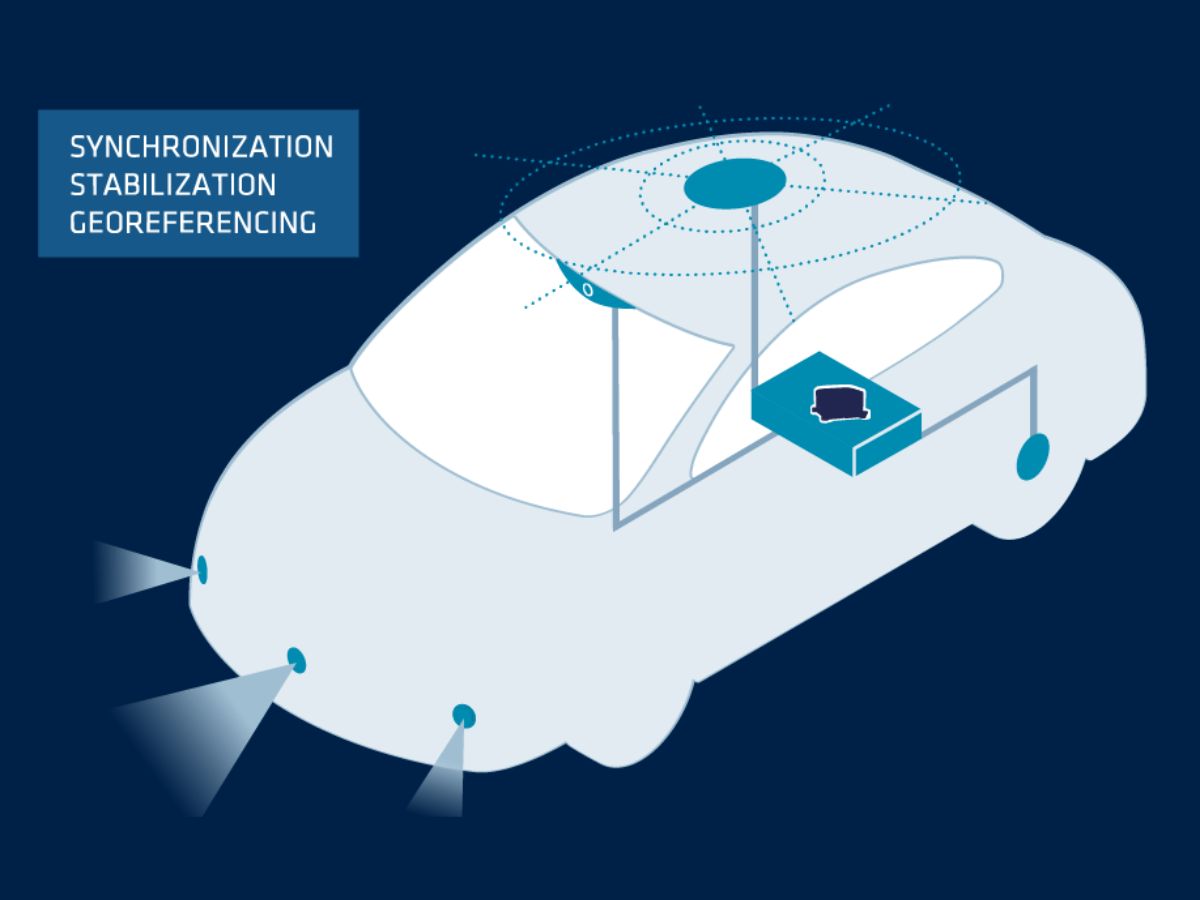
Single communication interface with built-in sync
Our inertial systems support a streamlined integration process with a single communication interface. The INS can serve as the central hub for data from both GNSS and LiDAR sensors. By using standard communication protocols like RS-232, Ethernet, or CAN, you can interface the INS with your GNSS receiver and mobile LiDAR system, minimizing hardware complexity and avoiding the need for multiple communication links. This allows to focus on SLAM algorithm development without worrying about data synchronization and transmission complexities.
Our INS solutions come with built-in synchronization capabilities that ensure seamless data fusion between GNSS, LiDAR, and inertial data.
The INS can serve as the master clock, synchronizing timestamps from all sensors, which is critical for SLAM operations. With real-time clock (RTC) features and the ability to handle GNSS timing and external trigger signals, the INS will ensure that GNSS and LiDAR data are aligned properly for accurate SLAM processing.
Real-time and post-processing capabilities
Mobile mapping systems provide both real-time and post-processing capabilities, allowing users to access immediate data while also refining the results later for enhanced accuracy.
Real-time data acquisition allows decision-makers to make on-the-spot assessments, while post-processing software ensures that the final output is as accurate as possible. Inertial systems contribute significantly to this process by maintaining consistent and reliable positional data, even when satellite signals are unavailable or degraded.
Mobile mapping platforms equipped with inertial systems offer flexibility in data collection and analysis. Operators can adjust parameters on the fly, ensuring that their mapping projects meet the required standards for accuracy and precision.
For further refinement, we offer Qinertia, a powerful post-processing software that can enhance your SLAM results by improving GNSS and INS data accuracy using offline processing.

Our solutions for mobile mapping
Our inertial navigation systems (INS) are designed specifically for survey markets, offering high performance and ease of use. Built on advanced inertial sensors, they integrate cutting-edge algorithms and GNSS technology to deliver precise navigation and positioning data. Our systems are highly adaptable, with configurable components to meet specific application needs

Ekinox-D

Apogee-D

Navsight Land-Air
Mapping applications brochure
Get our brochure delivered straight to your inbox!
Case studies
SBG Systems has partnered with leading companies across various industries to deliver high-performance inertial solutions for mobile mapping. Our case studies showcase the success stories of projects where our technology played a pivotal role in data acquisition and analysis.



They talk about us
Hear first hand, from the innovators and clients who have adopted our technology.
Their testimonials and success stories illustrate the significant impact our sensors have in practical autonomous vehicles applications.
Do you have questions?
Our FAQ section covers the most common questions about mobile mapping systems, including information about the technologies involved, best practices, and how to integrate our products into your solutions.
What is SLAM?
SLAM, which stands for Simultaneous Localization and Mapping, is a computational technique used in robotics and computer vision to build a map of an unknown environment while simultaneously keeping track of an agent’s location within that environment. This is particularly useful in scenarios where GNSS is unavailable, such as indoors or in dense urban areas.
SLAM systems determine the agent’s position and orientation in real-time. This involves tracking the movement of the robot or device as it navigates through the environment. While the agent moves, the SLAM system creates a map of the environment. This can be a 2D or 3D representation, capturing the layout, obstacles, and features of the surroundings.
These systems often utilize multiple sensors, such as cameras, LiDAR, or inertial measurement units (IMUs), to gather data about the environment. This data is combined to improve the accuracy of both localization and mapping.
SLAM algorithms process the incoming data to update the map and the agent’s location continuously. This involves complex mathematical computations, including filtering and optimization techniques.
What is Real Time Kinematic?
Real-Time Kinematic (RTK) is a precise satellite navigation technique used to enhance the accuracy of position data derived from Global Navigation Satellite System (GNSS) measurements. It is widely employed in applications such as surveying, agriculture, and autonomous vehicle navigation.
By using a base station that receives GNSS signals and calculates its position with high accuracy. Then it transmits correction data to one or more roving receivers (rovers) in real-time. The rovers use this data to adjust their GNSS readings, enhancing their positional accuracy.
RTK provides centimeter-level accuracy by correcting GNSS signals in real time. This is significantly more precise than standard GNSS positioning, which typically offers accuracy within a few meters.
The correction data from the base station is sent to the rovers via various communication methods, such as radio, cellular networks, or the Internet. This real-time communication is crucial for maintaining accuracy during dynamic operations.
What is Precise Point Positioning?
Precise Point Positioning (PPP) is a satellite navigation technique that offers high-precision positioning by correcting satellite signal errors. Unlike traditional GNSS methods, which often rely on ground-based reference stations (like in RTK), PPP utilizes global satellite data and advanced algorithms to provide accurate location information.
PPP works anywhere in the world without the need for local reference stations. This makes it suitable for applications in remote or challenging environments where ground infrastructure is lacking. By using precise satellite orbit and clock data, along with corrections for atmospheric and multipath effects, PPP minimizes common GNSS errors and can achieve centimeter-level accuracy.
While PPP can be used for post-processed positioning, which involves analyzing collected data after the fact, it can also provide real-time positioning solutions. Real-time PPP (RTPPP) is increasingly available, allowing users to receive corrections and determine their position in real time.
What is a Real Time Clock?
A Real Time Clock (RTC) is an electronic device designed to keep track of the current time and date, even when powered off. Widely utilized in applications requiring precise timekeeping, RTCs serve several key functions.
First, they maintain an accurate count of seconds, minutes, hours, days, months, and years, often incorporating leap year and day-of-week calculations for long-term precision. RTCs operate on low power and can run on battery backup, enabling them to continue keeping time during outages. They also provide timestamps for data entries and logs, ensuring accurate documentation.
Additionally, RTCs can trigger scheduled operations, allowing systems to wake up from low-power states or perform tasks at specified times. They play a crucial role in synchronizing multiple devices, ensuring they operate cohesively.
RTCs are integral in various devices, from computers and industrial equipment to IoT devices, enhancing functionality and ensuring reliable time management across multiple applications.
