
The NED (North-East-Down) coordinate frame serves as a widely used reference system for navigation and inertial measurements.
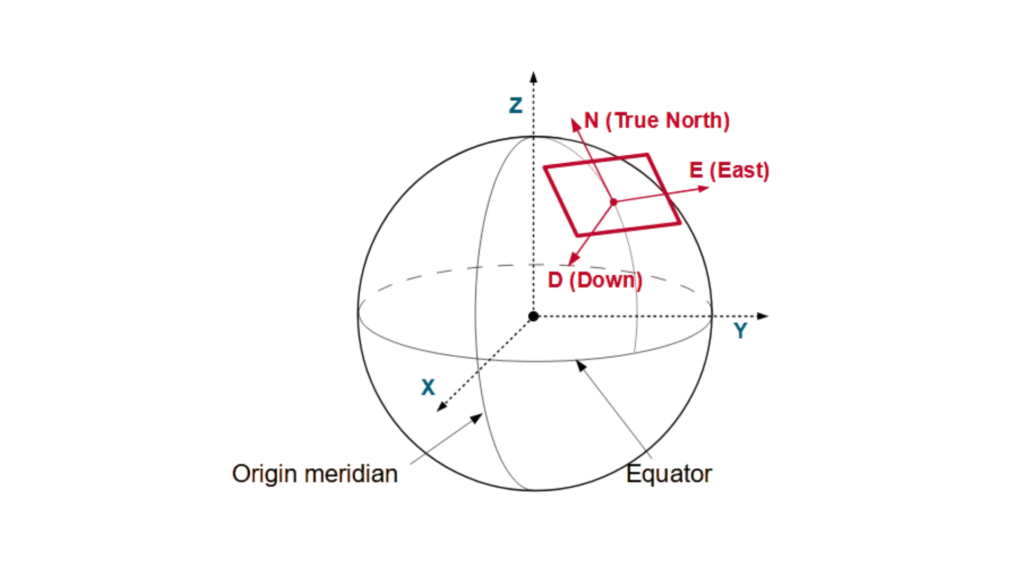
The North-East-Down (NED) frame serves as a local reference frame, defined by its ECEF coordinates. Typically, it remains fixed to the vehicle or platform and moves with the body frame. This frame positions the North and East axes in a plane tangent to Earth’s surface at its current location, based on the WGS84 ellipsoid model.
It consists of three orthogonal axes: the North axis points to True North, the Down axis extends toward Earth’s interior (opposite to the local Up direction), and the East axis completes the right-handed system by pointing east (perpendicular to North).
Similarly, a vehicle or platform can have the East-North-Up (ENU) frame locally attached, moving with the system. Unlike the NED frame, the ENU frame orients its axes differently: the North axis still points to True North, but the Up axis extends away from Earth’s interior, while the East axis maintains its right-handed system alignment by pointing east.
This right-handed coordinate system simplifies calculations for aircraft, marine vessels, and autonomous vehicles by aligning with natural movement directions.
NED applications use
A drone relies on an autopilot system to calculate its trajectory within the NED coordinate framework. When the drone is in a northward flight, its position increases in the North direction. Conversely, when the drone ascends, its Down coordinate value decreases, given that Down is positive downward.
Conversely, a ship’s INS (Inertial Navigation System) functions by tracking its movement relative to the NED frame. As the vessel moves eastward, its East coordinate increases. Conversely, when the vessel dives, its Down coordinate rises.
A self-driving car utilises the NED frame to ascertain its position. The vehicle’s North coordinate increases as it moves northward, while bumps or dips in the terrain cause changes in the Down value.
Precision-guided munitions rely on the NED frame to adjust their trajectory. As a missile descends toward its target, the Down coordinate increases, ensuring accurate targeting.
AUVs (Autonomous Underwater Vehicles) utilise the NED frame to navigate. When an AUV moves in a northeast direction, both the North and East coordinates increase, while changes in depth affect the Down coordinate.
The NED system has been developed to align movements with the Earth’s natural orientation, thereby simplifying navigation. This system is utilized by engineers, pilots and scientists to enhance precision in positioning, guidance and control applications.
