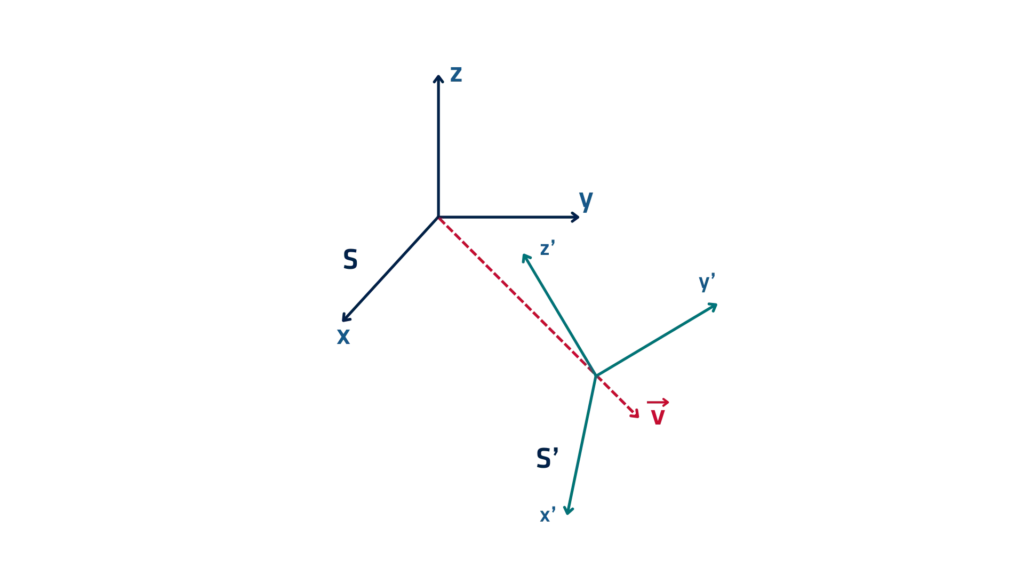
An inertial reference frame is a coordinate system in which objects follow Newton’s laws of motion without the need to account for fictitious or external forces. In other words, it is a non-accelerating frame—either at rest or moving at constant velocity—where a body remains at rest or continues in uniform motion unless acted upon by an external force. Scientists and engineers rely on inertial frames to analyze motion accurately in space, aviation, marine, and robotics systems.
Defining Characteristics
An inertial frame does not accelerate or rotate. This stability makes it ideal for applying Newton’s second law, F = ma, without introducing correction forces like Coriolis or centrifugal forces. For example, space outside Earth’s atmosphere can closely approximate an inertial frame because there is minimal gravitational disturbance or rotational influence. This makes it perfect for spacecraft dynamics and satellite motion modeling.
In space missions, engineers use an inertial reference frame to calculate spacecraft trajectories. When a satellite launches, mission control defines its initial position and velocity in an inertial frame. As the satellite moves, it continues in its predicted path unless thrusters apply force.
Another example is in aircraft navigation. Although Earth’s surface is not a perfect inertial frame due to its rotation, high-precision inertial navigation systems (INS) onboard jets and missiles approximate motion within an inertial frame for short durations. This allows these systems to provide accurate position and velocity data without GPS.
During underwater navigation, submarines often operate without external signals. Their INS estimates position based on an inertial frame assumption, using accelerometers and gyroscopes to track movement over time.
In robotics, engineers simulate robot motion using inertial frames in virtual environments. By ignoring friction or external interferences, they can accurately model and optimize path planning and control algorithms.
Limitations and Corrections
Although true inertial frames don’t exist on Earth due to its rotation and gravity, scientists use pseudo-inertial frames for practical purposes. They apply corrections using reference data (e.g., GNSS or star trackers) to maintain accuracy in long-term measurements.
Inertial reference frames are fundamental to understanding and predicting motion. By assuming a stable, force-free environment, engineers can design reliable navigation systems, flight paths, and robotic controls across various advanced applications.
