uORocketry reaches the Top 10 in SA Cup with SBG INS/GNSS
Ottawa University’s Rocketry team integrates Ellipse-N Inertial Navigation System for the Spaceport America Cup.
“The unit and expertise SBG Systems provided helped us getting closer to achieving an optimized control algorithm for the airbrakes.” | Ottawa University’s Rocketry team

University of Ottawa participated in the Spaceport America Cup
The Spaceport America Cup is the world’s largest international intercollegiate rocket engineering contest, combining academic conferences and competition.
During the 2019 edition, 1,500 students from more than 124 teams launched solid, liquid, and hybrid rockets to target altitudes of 10,000 and 30,000 feet.

For their 2nd participation, uORocketry, the University of Ottawa Rocketry Team, proceeded to another iteration on their previously successful design to improve key features.
A rocket with an amazing automated air-braking system
uORocketry rocket, Jackalope, enjoys a significant competitive advantage: its automated air-braking system, fully controlled by their on-board flight computer. It increases drag and slows the rocket down as it approaches altitude.
One of the team’s major goals this year was the improvement of their recovery system’s reliability.
To achieve it, they relied on their mechanically robust air-braking system, as well as a control method to effectively actuate it.
The avionics system is responsible for the real-time control of the airbrakes, staging of the recovery system, and sending telemetry during flight for data logging and recovery.
Improving the recovery system reliability thanks to the Ellipse-N
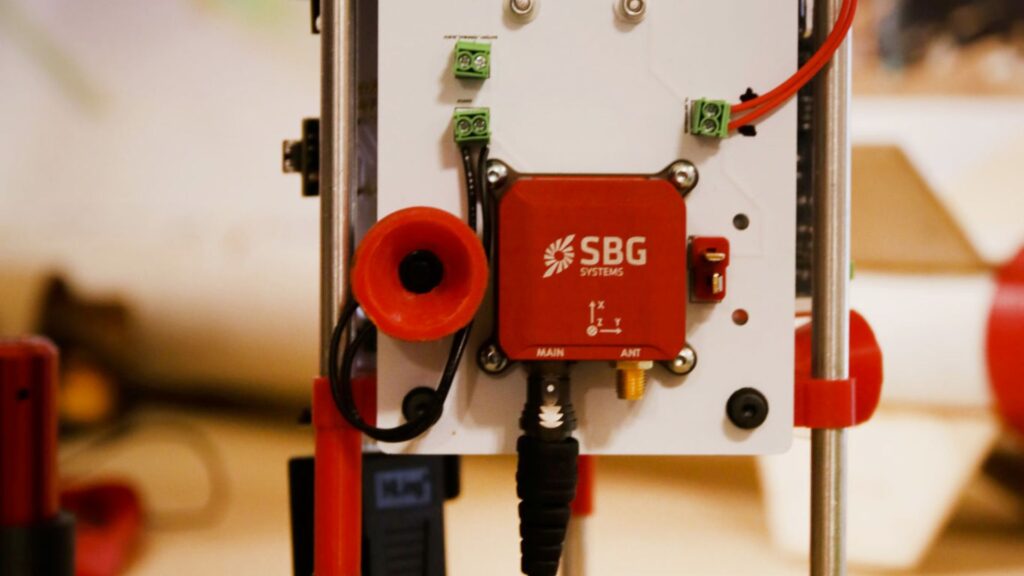
uORocketry integrated SBG Systems’ Ellipse-N Inertial Navigation System to their 2019 avionics solution in order to achieve an optimized control algorithm for the airbrakes.
The team integrated this INS GNSS sensor solution into the hardware’s power board, using it for state estimations to determine the ideal airbrake deployment.
Air-braking scheme integrating an INS
The Ellipse-N INS GNSS Sensors embeds an inertial measurement unit composed of accelerometers, gyroscopes, and magnetometers coupled with a GPS and a barometer.
Our solution provides robust orientation, altitude, and navigation data in the harshest conditions thanks to high-quality industrial-grade components calibrated in dynamics and temperature (from -40°C to 85°C).
It was used to best control the flight and reach the required altitude, and also to deploy the recovery system optimally. It helped finding the rocket’s proper configuration and ideal position to deploy the parachutes for landing and recovery.
uORocketry has participated in the SA Cup in both 2018 and 2019. With their rocket named Jackalope, they reached the TOP 10 this year, as they ranked 8th/122!
They were also placed 4th out of the 47 teams competing in their category: 10,000ft altitude, commercial motor. More than just competing, they even gave a presentation about their air-braking scheme, used for a precise final altitude during flights.
About uORocketry
uOttawa Rocketry is a multidisciplinary university-based student engineering team founded in 2016.
Since then, they’ve developed numerous aerospace projects such as a hybrid rocket engine, a parachute concept, custom avionics systems, and even unique ignition mechanisms.
Their main focus, however, is building rockets.


Ellipse-N
Ellipse-N is a compact and high-performance RTK Inertial Navigation System (INS) with an integrated Dual band, Quad Constellations GNSS receiver. It provides roll, pitch, heading, and heave, as well as a centimetric GNSS position.
Ellipse-N sensor is best suited for dynamic environments, and harsh GNSS conditions, but can also operate in lower dynamic applications with a magnetic heading.

Ask a quotation for Ellipse-N
Do you have questions?
Welcome to our FAQ section! Here, you’ll find answers to the most common questions about the applications we showcase. If you don’t find what you’re looking for, feel free to contact us directly!
Does INS accept inputs from external aiding sensors?
Inertial Navigation Systems from our company accept inputs from external aiding sensors, such as air data sensors, magnetometers, Odometers, DVL and other.
This integration makes the INS highly versatile and reliable, especially in GNSS-denied environments.
These external sensors enhance the overall performance and accuracy of the INS by providing complementary data.
What is the difference between AHRS and INS?
The main difference between an Attitude and Heading Reference System (AHRS) and an Inertial Navigation System (INS) lies in their functionality and the scope of the data they provide.
AHRS provides orientation information—specifically, the attitude (pitch, roll) and heading (yaw) of a vehicle or device. It typically uses a combination of sensors, including gyroscopes, accelerometers, and magnetometers, to calculate and stabilize the orientation. The AHRS outputs the angular position in three axes (pitch, roll, and yaw), allowing a system to understand its orientation in space. It is often used in aviation, UAVs, robotics, and marine systems to provide accurate attitude and heading data, which is critical for vehicle control and stabilization.
A INS not only provides orientation data (like an AHRS) but also tracks a vehicle’s position, velocity, and acceleration over time. It uses inertial sensors to estimate movement in 3D space without relying on external references like GNSS. It combines the sensors found in AHRS (gyroscopes, accelerometers) but may also include more advanced algorithms for position and velocity tracking, often integrating with external data like GNSS for enhanced accuracy.
In summary, AHRS focuses on orientation (attitude and heading), while INS provides a full suite of navigational data, including position, velocity, and orientation.
What is the difference between IMU and INS?
The difference between an Inertial Measurement Unit (IMU) and an Inertial Navigation System (INS) lies in their functionality and complexity.
An IMU (inertial measuring unit) provides raw data on the vehicle’s linear acceleration and angular velocity, measured by accelerometers and gyroscopes. It supplies information on roll, pitch, yaw, and motion, but does not compute position or navigation data. The IMU is specifically designed to relay essential data about movement and orientation for external processing to determine position or velocity.
On the other hand, an INS (inertial navigation system) combines IMU data with advanced algorithms to calculate a vehicle’s position, velocity, and orientation over time. It incorporates navigation algorithms like Kalman filtering for sensor fusion and integration. An INS supplies real-time navigation data, including position, velocity, and orientation, without relying on external positioning systems like GNSS.
This navigation system is typically utilized in applications that require comprehensive navigation solutions, particularly in GNSS-denied environments, such as military UAVs, ships, and submarines.