Ellipse-D powering a self-driving truck
Self-driving truck with independent wheel drive and steering system.
“The Ellipse-D from SBG Systems was easy to use, very accurate, and stable, with a small form factor—all of which were essential for our WATonoTruck development.” | Amir K., Professor and Director, University of Waterloo

We all know that accidents on the road occur due to driver errors, adverse weather conditions, or vehicle malfunctions. But what if we could make vehicles drive on their own, avoiding these accidents ? For instance, a self-driving Truck or autonomous car.
That’s the idea behind self-driving vehicles, and the University of Waterloo’s Mechatronic Vehicle Systems (MVS) Lab is working on a project called WATonoTruck (WATerloo atonomous Truck).
It’s a self-driving flatbed truck designed for heavy material handling, farming, and service applications. It uses advanced control methods analyze truck movements, especially in hazardous conditions or malfunction scenarios, ensuring safety and efficiency.
The lab aims to extend the application of autonomous vehicle technology beyond passenger transportation. They want to use it in other industries like agriculture, mining, and shipping, thereby increasing efficiency and reducing operational downtime.
Meet WATonoTruck
A truck that doesn’t need a driver – that’s WATonoTruck! It is a self-driving flatbed truck with independent wheel drive and steering system. It is built on the corner module (CM) platform.
The CMs were developed with modular vehicle design in mind and can be installed on any chassis in any configuration.
Each CM functions as a single-wheel electric vehicle equipped with its own control unit. It allows operating independently with drive, brake, steering, and suspension systems.
This makes the truck super smart and adaptable to any application and terrain.
WATonoTruck empowered by Ellipse-D
As a leader in high-precision positioning and navigation solutions, we are proud to collaborate with the University of Waterloo’s Mechatronic Vehicle Systems Lab.
We provide Ellipse-D, a dual antenna RTK INS, delivering unmatched accuracy in position and heading.
This level of precision is crucial for autonomous navigation, ensuring the safe and accurate movement of WATonoTruck even in challenging environments.
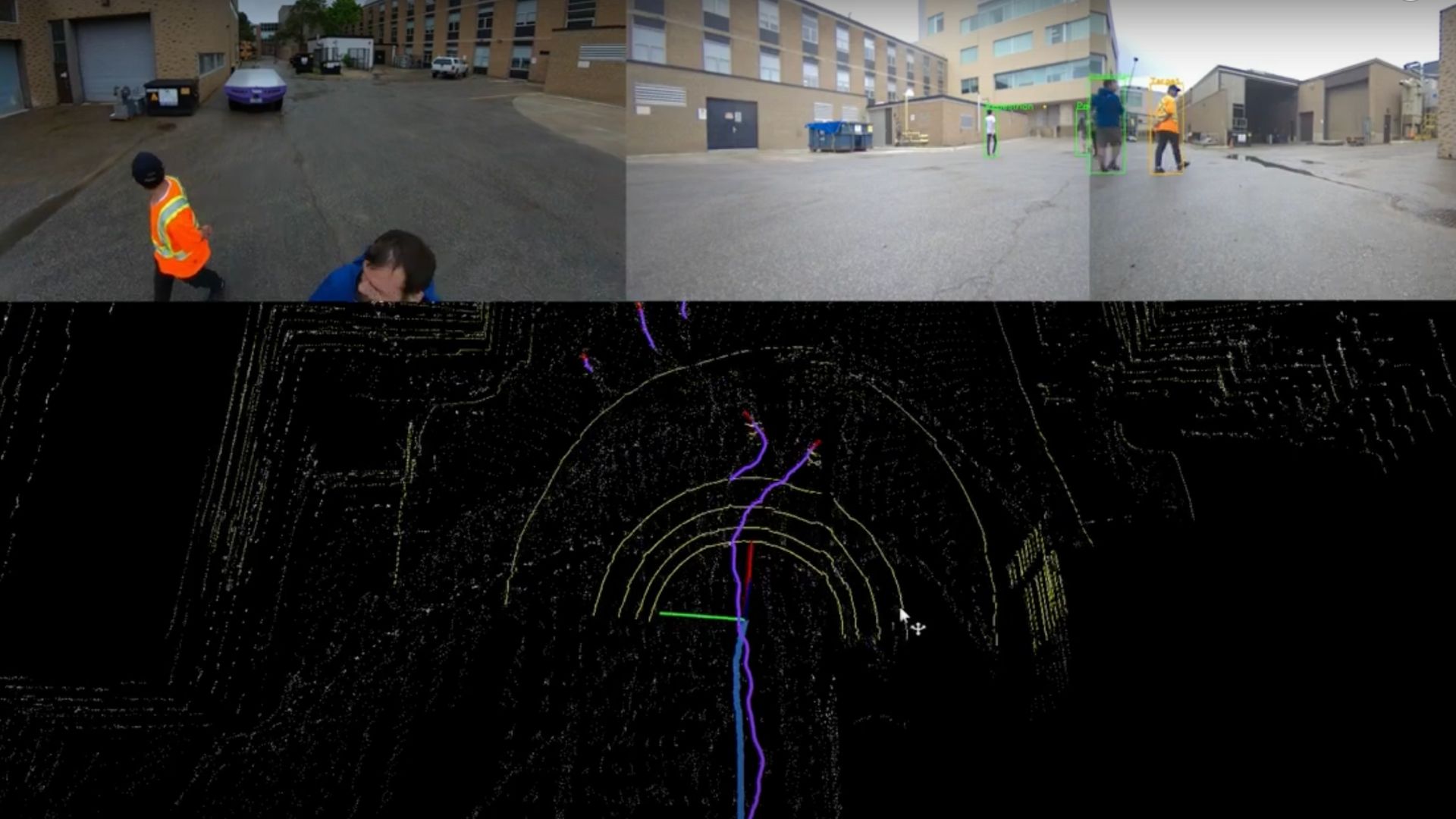
Ellipse-D (3rd generation), LiDAR sensors, and advanced cameras- this comprehensive sensor suite enables real-time environment mapping, obstacle detection, and path planning.
Through our sponsorship, the lab’s development of WATonoTruck gains vital support in terms of high-precision ensuring Motion and Navigation they can trust.
This collaborative endeavor not only contributes to the successful development of WATonoTruck but also promotes the growth of autonomous vehicle applications across industries, driving innovation and safety in transportation and beyond.

Ellipse-D
The Ellipse-D is an inertial navigation system integrating a dual antenna and dual frequency RTK GNSS that is compatible with our Post-Processing software Qinertia.
Designed for robotic and geospatial applications, it can fuse Odometer input with Pulse or CAN OBDII for enhanced dead-reckoning accuracy.

Ask a quotation for Ellipse-D
Do you have questions?
Welcome to our FAQ section! Here, you’ll find answers to the most common questions about the applications we showcase. If you don’t find what you’re looking for, feel free to contact us directly!
What is the difference between RTK and PPK?
Real-Time Kinematic (RTK) is a positioning technique where GNSS corrections are transmitted in near real time, typically using an RTCM format correction stream. However, there can be challenges in ensuring the GNSS corrections, specifically their completeness, availability, coverage, and compatibility.
The major advantage of PPK over RTK post processing is that the data processing activities can be optimized during post-processing, including forward and backward processing, whereas in real-time processing, any interruption or incompatibility in the corrections and their transmission will lead to lower accuracy positioning.
A first key advantage of GNSS post-processing (PPK) vs. real time (RTK) is that the system used on the field does not need to have a datalink/radio to feed the RTCM corrections coming from the CORS into the INS/GNSS system.
The main limitation to post processing adoption is the requirement of the final application to act on the environment. On the other hand, if your application can withstand the additional processing time needed to produce an optimized trajectory, it will greatly improve the data quality for all your deliverables.
What is Precise Point Positioning?
Precise Point Positioning (PPP) is a satellite navigation technique that offers high-precision positioning by correcting satellite signal errors. Unlike traditional GNSS methods, which often rely on ground-based reference stations (like in RTK), PPP utilizes global satellite data and advanced algorithms to provide accurate location information.
PPP works anywhere in the world without the need for local reference stations. This makes it suitable for applications in remote or challenging environments where ground infrastructure is lacking. By using precise satellite orbit and clock data, along with corrections for atmospheric and multipath effects, PPP minimizes common GNSS errors and can achieve centimeter-level accuracy.
While PPP can be used for post-processed positioning, which involves analyzing collected data after the fact, it can also provide real-time positioning solutions. Real-time PPP (RTPPP) is increasingly available, allowing users to receive corrections and determine their position in real time.
