







Qinertia GNSS+INS Logiciel de post-traitement (PPK)
La précision en toute simplicité
Bienvenue à l'avant-garde de l'innovation géospatiale. Qinertia Le logiciel PPK offre un tout nouveau niveau de solutions de positionnement de haute précision. Dans un monde qui exige une précision sans compromis, notre logiciel PPK s'impose comme la pierre angulaire pour les professionnels et les industries qui recherchent une confiance inégalée dans leurs données de localisation.
Un logiciel de post-traitement qui fonctionne vraiment
Obtenez une précision inégalée dans vos flux de travail en post-traitant vos données de localisation brutes. Qinertia est crucial dans les applications nécessitant une précision au centimètre près, telles que les levés géospatiaux, la cartographie et l'hydrographie.





Gamme d'applications
GNSS-INS
Fonctionnalités
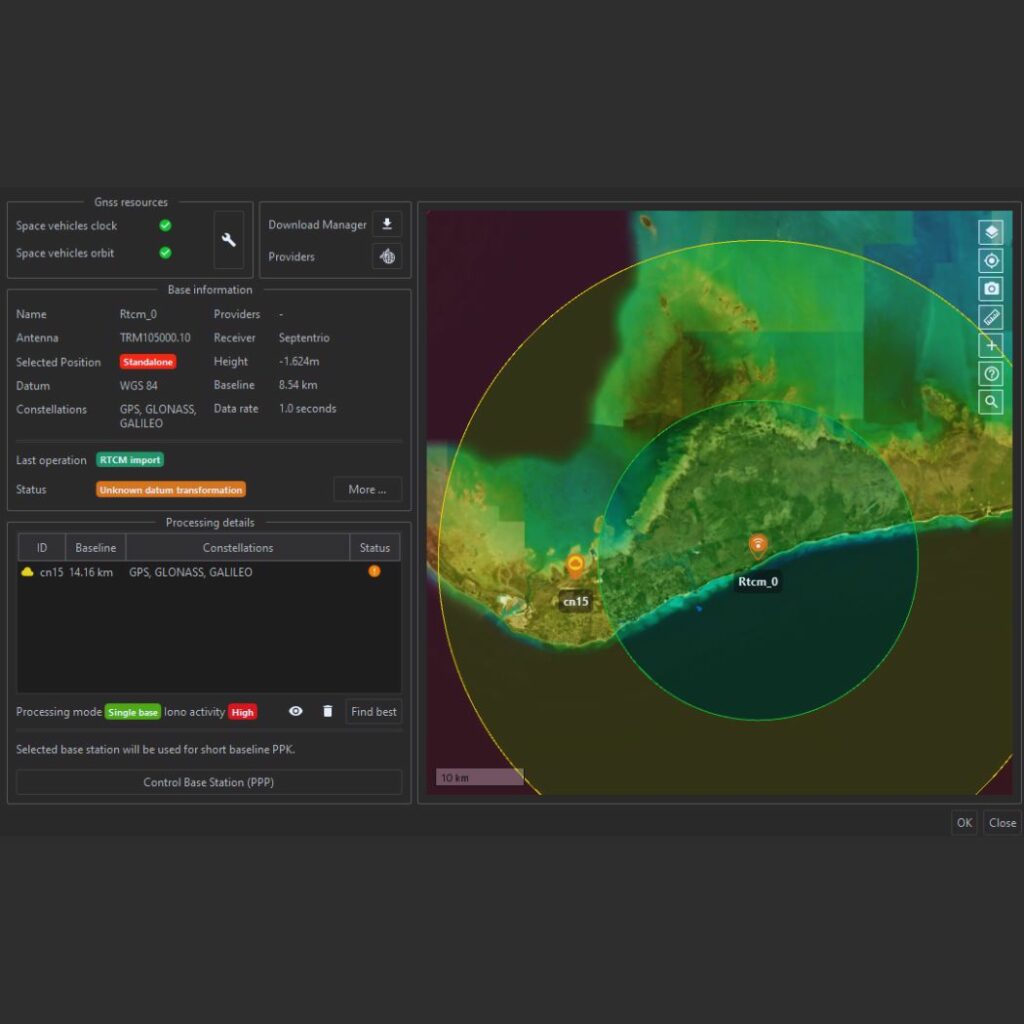
Carte de couverture des stations de base
Incroyablement convivial, il est également très polyvalent. Grâce à une vaste sélection de systèmes de référence de coordonnées (CRS) préconfigurés
Nouveau moteur de géodésie
Le nouveau moteur de géodésie de Qinertia dispose d'une suite exhaustive d'outils qui sont non seulement incroyablement conviviaux mais aussi très polyvalents.
Avec une sélection étendue de systèmes de référence de coordonnées (CRS) préconfigurés, Qinertia vous permet d'exploiter les systèmes et transformations officiels essentiels pour vos projets. Vous pouvez également créer des transformations personnalisées adaptées à vos besoins spécifiques ou scientifiques.
Mode IonoShield
Le mode IonoShield de Qinertia révolutionne la façon dont vous gérez l'activité ionosphérique dans vos journaux. La surveillance des conditions ionosphériques n'a jamais été aussi facile.
Désormais, vous pouvez évaluer sans effort l'activité ionosphérique et la longueur de la ligne de base, ce qui vous permet de prendre des décisions éclairées sur le mode de traitement optimal pour vos données.
Intégration CORS étendue
Vous pouvez désormais accéder au réseau SmartNet CORS, avec son impressionnante couverture mondiale de 5300 stations de base (abonnement supplémentaire requis).
L'accès Smartnet est intégré de manière transparente dans Qinertia, ce qui vous garantit la flexibilité et la commodité d'exploiter cette technologie de la manière qui vous convient le mieux.
PPK avec RTCM en direct
Vous pouvez désormais atteindre une précision inégalée dans vos flux de travail PPK en traitant vos données avec les corrections RTCM utilisées dans les opérations en temps réel. Il est important de noter que cette fonction est spécifiquement conçue pour les scénarios à base unique en temps réel et qu'elle est incompatible avec les configurations VBS.
Le RTCM Stream en Qinertia redéfinit la précision et offre plus d'options pour votre PPK.

Découvrez nos stations de base
Qinertia s'appuient sur un réseau de plus de 10 000 stations de base dans 164 pays pour améliorer la précision du GNSS. Découvrez les stations sur le site MySBG.
PPK simplifié pour des résultats précis
Notre logiciel de post-traitement PPK offre une expérience transparente à tous les utilisateurs grâce à son interface intuitive et à ses flux de travail guidés. La configuration rapide du projet, la saisie des données par glisser-déposer et la sélection automatique de la meilleure station de base simplifient les tâches, tandis que les options avancées s'adressent aux experts. Des mises à jour régulières basées sur le retour d'information garantissent une amélioration continue et une fonctionnalité centrée sur l'utilisateur.

Gestion des stations de base
- Jusqu'à 10 000 stations de base dans 164 pays sont directement disponibles sur Qinertia.
- Lorsque vous importez votre propre station de base, la fonction de contrôle de la station de base PPP vous aide à vérifier sa position avec précision.

Modes de traitement des PPK
- Station de base unique courte ligne de base.
- Station de base unique Ionoshield mode.
- Station de base virtuelle pour la cartographie des couloirs.
- Le PPP le plus étroitement couplé au monde.

Logiciel axé sur l'utilisateur
- Une interface moderne et conviviale pour vous permettre d'être opérationnel en quelques minutes.
- Des outils puissants pour les utilisateurs les plus avancés.
- Régulièrement mis à jour avec de nouvelles fonctionnalités basées sur les commentaires des utilisateurs.

Intégration facile du flux de travail
Pour les développeurs de logiciels. Utilisez Qinertia Cloud APIs ou Qinertia CLI pour libérer la puissance de PPK dans votre logiciel :
- Interface graphique conviviale.
- CLI pour le traitement des données récurrentes.
- Résultats et rapports générés entièrement personnalisables.
Plus de fonctionnalités
Découvrez une approche transformatrice du traitement des données GNSS avec le logiciel Qinertia PPK de SBG Systems- ses puissantes fonctionnalités sont spécialement conçues pour élever vos opérations à de nouveaux sommets !

Affichage et réglages GNSS avancés
Qinertia améliore automatiquement la précision de votre PPK en excluant intelligemment les satellites dont la qualité du signal est médiocre, garantissant ainsi que seules les données de la plus haute qualité sont utilisées dans vos calculs. De plus, les utilisateurs ont désormais la possibilité de prendre les choses en main en désactivant manuellement des satellites individuels, des bandes de signaux entières ou même des constellations entières dans leurs solutions PPK.
Pour soutenir ces capacités avancées, nous avons introduit une série de graphiques informatifs qui vous permettent d'évaluer facilement la qualité du signal GNSS. Contrôlez vos données GNSS en toute confiance grâce au réglage et à l'affichage avancés du GNSS sur le site Qinertia.
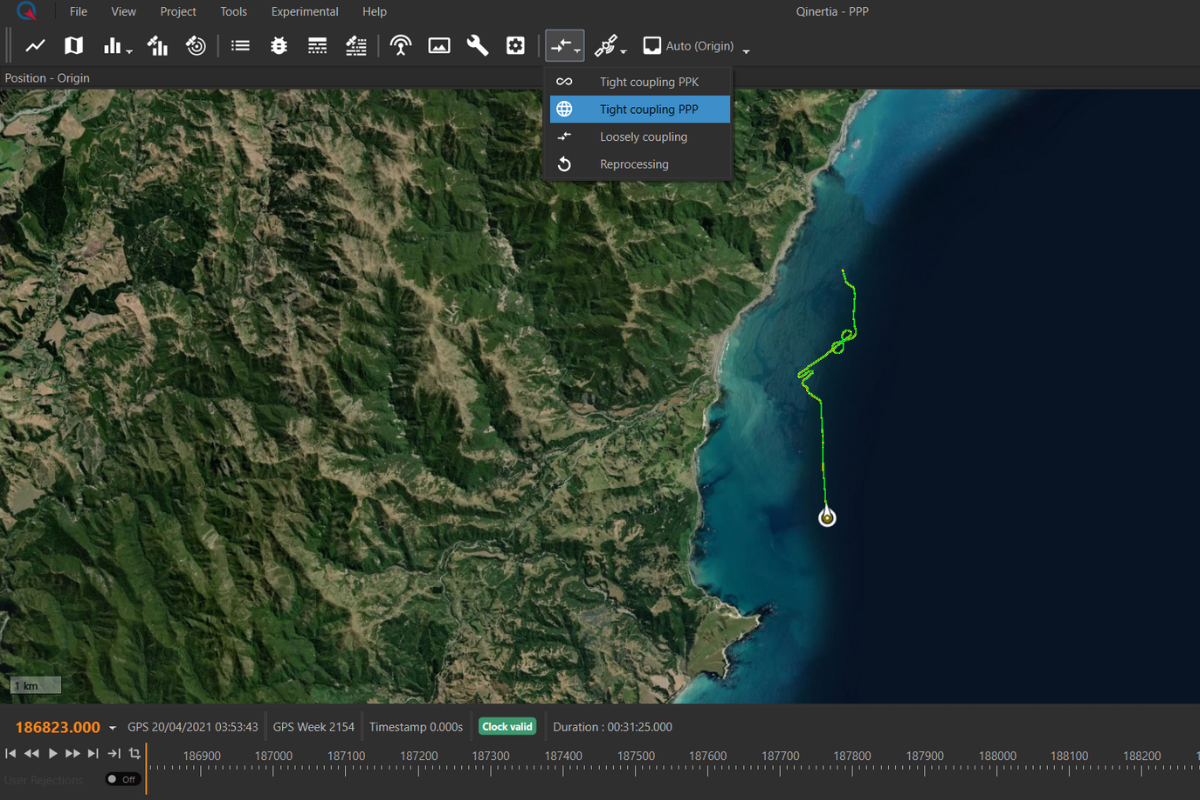
PPP étroitement couplé
Le couplage serré PPP dans Qinertia est maintenant disponible 24 heures après votre mission. L'intégration de l'algorithme SBG PPP avec le couplage serré porte la précision des calculs à un nouveau niveau.
Il permet non seulement d'améliorer votre capacité en temps réel, mais aussi d'améliorer de manière significative l'analyse des données après la mission.
Mode piéton à antenne unique
Une fonction qui change la donne, conçue pour améliorer votre expérience dans les scénarios à faible dynamique et les cas d'utilisation d'une seule antenne.
Avec le profil de mouvement Pedestrian, Qinertia aligne sans effort votre cap, garantissant une précision optimale même dans les situations à faible dynamique et ouvrant un monde de possibilités pour la cartographie du sac à dos. L'alignement piéton, une nouvelle solution que vous attendiez.
Nos différentes éditions
Choisissez l'édition du logiciel Qinertia PPK qui correspond le mieux aux besoins de votre projet. Que vous travailliez sur un relevé d'infrastructure à grande échelle, une cartographie de haute précision ou tout autre projet nécessitant un post-traitement GNSS précis, Qinertia offre des options flexibles.
Chaque édition vous offre des fonctionnalités puissantes pour traiter vos données GNSS brutes et atteindre une précision centimétrique en seulement quelques clics.
| Type de traitement | Type de traitement GNSS uniquement | Type de traitement Inertie + GNSS | Type de traitement Inertie + GNSS | Type de traitement Inertie + GNSS |
|---|---|---|---|---|
| SBG IMU's soutenu | SBG IMU's pris en charge - | SBG IMU's supporté Ellipse Seulement | SBG IMU's supporté Ellipse & Quanta Series (Quanta Micro /Plus/Extra) | SBG IMU's pris en charge Toutes les UMI de SBG et de tiers |
| Tiers IMU | Tiers IMU - | Tiers IMU - | Tiers IMU - | Tiers IMU ● |
| Applications | Applications Tous les | Applications Land/Air | Applications Air | Applications Tous les |
| Licence | Licence Perpétuelle ou par abonnement | Licence Perpétuelle ou par abonnement | Licence Perpétuelle ou par abonnement | Licence Perpétuelle ou par abonnement |
| Traitement simultané | Traitement simultané 1 | Traitement simultané 1 | Traitement simultané 1 | Traitement simultané 1 |
| Traitement hors ligne | Traitement hors ligne ● | Traitement hors ligne ● | Traitement hors ligne ● | Traitement hors ligne ● |
| Traitement du serveur | Traitement du serveur - | Traitement du serveur - | Traitement du serveur - | Traitement du serveur - |
| Interface | Interface GUI + CLI | Interface GUI + CLI | Interface GUI + CLI | Interface GUI + CLI |
| Profil de mouvement | Profil de mouvement Statique (GNSS), aérien (UAV, avion, hélicoptère), terrestre (automobile, camion, chemin de fer), maritime (marine, marine à haute altitude et marine sous-marine), piéton | Profil de mouvement Statique (GNSS), aérien (drone, avion, hélicoptère), terrestre (automobile, camion, chemin de fer), piéton | Profil de mouvement Statique (GNSS), aérien (UAV, avion, hélicoptère) | Profil de mouvement Statique (GNSS), aérien (UAV, avion, hélicoptère), terrestre (automobile, camion, chemin de fer), maritime (marine, marine à haute altitude et marine sous-marine), piéton |
| Couplage étroit RTK&VBS&PPP | Couplage étroit RTK&VBS&PPP - | Couplage étroit RTK&VBS&PPP ● | Couplage étroit RTK&VBS&PPP ● | Couplage étroit RTK&VBS&PPP ● |
| Retraitement | Retraitement - | Retraitement ● | Retraitement ● | Retraitement ● |
| Couplage lâche | Couplage lâche - | Couplage lâche ● | Couplage lâche ● | Couplage lâche ● |
| GNSS RTK&VBS&PPP | GNSS RTK&VBS&PPP ● | GNSS RTK&VBS&PPP ● | GNSS RTK&VBS&PPP ● | GNSS RTK&VBS&PPP ● |
| Gestion des stations de base | Gestion des stations de base ● | Gestion des stations de base ● | Gestion des stations de base ● | Gestion des stations de base ● |
| Moteur de géodésie | Moteur de géodésie ● | Moteur de géodésie ● | Moteur de géodésie ● | Moteur de géodésie ● |
| IonoShield | IonoShield ● | IonoShield ● | IonoShield ● | IonoShield ● |
| Réseau CORS | Réseau CORS ● | Réseau CORS ● | Réseau CORS ● | Réseau CORS ● |
| Rapport | Rapport ● | Rapport ● | Rapport ● | Rapport ● |
| Diagnostic Rinex | Diagnostic Rinex ● | Diagnostic Rinex ● | Diagnostic Rinex ● | Diagnostic Rinex ● |
| Estimation du bras de levier | Estimation du bras de levier ● | Estimation du bras de levier ● | Estimation du bras de levier ● | Estimation du bras de levier ● |
| Statistiques | Statistiques ● | Statistiques ● | Statistiques ● | Statistiques ● |



Créez votre propre solution
Qinertia est le logiciel de post-traitement INS/GNSS de nouvelle génération conçu pour tous les utilisateurs, qu'il s'agisse d'un utilisateur individuel, d'une entreprise, d'un intégrateur de système, d'un éditeur de logiciel ou d'un fournisseur de services.
Des profils de mouvement d'application préconfigurés simplifient la configuration et optimisent les performances en fonction de vos besoins spécifiques.
Choisissez parmi toutes les solutions disponibles et personnalisez-les : desktop, OEM et cloud.

Des déploiements simples
Qinertia Desktop est une application de bureau conçue pour traiter efficacement des ensembles de données complexes en fournissant des outils d'analyse avancés et des paramètres personnalisables.
Grâce à son interface conviviale, il vous permet d'importer, de traiter et d'analyser rapidement vos données.
Idéal pour les utilisateurs individuels ou les équipes travaillant au bureau.

Intégration transparente avec votre matériel ou vos logiciels
Qinertia OEM offre un processus d'intégration en douceur, vous permettant d'incorporer un traitement PPK puissant dans vos solutions, offrant à vos clients un positionnement de haute précision fiable et efficace en toute simplicité, que vous soyez un fabricant de matériel, un intégrateur de systèmes ou un fournisseur de services.
Vous pouvez personnaliser l'interface du logiciel, les flux de travail et les fonctionnalités en fonction de votre marque et des besoins des utilisateurs.

Permettre une gestion souple, évolutive et à distance.
Qinertia Cloud est conçu pour les développeurs, les intégrateurs et les entreprises à la recherche d'une solution PPK évolutive qui offre tout le potentiel d'un post-traitement précis avec la commodité et la flexibilité de la technologie basée sur cloud.
Que vous construisiez une application personnalisée, offriez des services en ligne ou étendiez vos capacités existantes, Qinertia Cloud API vous permet de fournir à vos utilisateurs des performances PPK de premier ordre.
Compatible avec de nombreux récepteurs tiers
Qinertia est compatible avec les récepteurs tiers qui peuvent fournir des données GNSS brutes*, y compris : Septentrio, Trimble, Novatel, Ublox, Topcon, Javad, Ashtec, Spectra récepteurs GNSS...
Accédez à toutes les fonctionnalités de Qinertia : Analyse des formats de fichiers du récepteur GNSS, GNSS PPK, optionnellement avec couplage inertiel, GNSS PPP, optionnellement avec couplage inertiel, Tous les affichages de graphiques et d'analyses, PPK effectué en utilisant toutes les bandes de constellations disponibles et bien plus encore...
*Récepteurs GNSS pris en charge : double bande et plus (L1, L1+L2, L1+L5, L1+L2+L5).
Documentation et ressources
Toutes les solutions Qinertia sont accompagnées d'une documentation complète, conçue pour aider les utilisateurs à chaque étape.
Des guides d'installation à la configuration avancée et au dépannage, nos manuels clairs et détaillés garantissent une intégration et un fonctionnement sans heurts.
La nouvelle génération de logiciels PPK.
Manuel de l'utilisateur en ligneVous y trouverez des articles pratiques, des vidéos et la documentation complète du logiciel.
Accéder à votre compte MySBGMontez à bord pour découvrir les nouveautés de votre compte MySBG. Restez informé des dernières nouveautés concernant vos produits et de toutes les informations sur la façon de créer des clés API pour utiliser nos services.
Vérifier l'état du serveur QinertiaRestez informé de l'état de votre serveur Qinertia . Obtenez des informations complètes sur : Uptime, Overall Uptime, Response Time et Recent Events sur votre logiciel Qinertia .
Visite guidée de Qinertia
Embarquez pour une visite détaillée de notre logiciel de post-traitement avec Lea, notre chef de produit Qinertia .

Demander une démonstration de Qinertia
Explorer des cas d'utilisation réels
Découvrez comment notre logiciel de post-traitement, Qinertia GNSS+INS, permet aux professionnels de divers secteurs d'activité. Qu'il s'agisse de géoréférencement précis pour la cartographie par drone ou de navigation améliorée dans des environnements difficiles, nos études de cas montrent comment Qinertia offre une précision et une efficacité inégalées.
Découvrez comment nos clients exploitent Qinertia pour surmonter les défis, optimiser les performances et obtenir des résultats exceptionnels.



Ils parlent de nous
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat.
FAQ sur les logiciels de post-traitement
Notre section FAQ sur les logiciels de post-traitement fournit des réponses complètes aux questions les plus courantes sur les outils de post-traitement avancés SBG Systems'.
Dans cette section, vous trouverez des explications détaillées sur la fonctionnalité, l'intégration et les avantages de nos solutions de post-traitement. Que vous ayez besoin d'aide pour optimiser votre flux de travail, comprendre la compatibilité ou dépanner, cette FAQ vous offre des informations précieuses pour vous aider à maximiser les performances de nos logiciels dans vos projets.
Explorez les réponses et augmentez votre efficacité opérationnelle grâce à des solutions de traitement de données fiables.
Qu'est-ce que le post-traitement GNSS ?
Le post-traitement GNSS, ou PPK, est une approche dans laquelle les mesures brutes des données GNSS enregistrées sur un récepteur GNSS sont traitées après l'activité d'acquisition des données. Elles peuvent être combinées avec d'autres sources de mesures GNSS pour fournir la trajectoire cinématique la plus complète et la plus précise pour ce récepteur GNSS, même dans les environnements les plus difficiles.
Ces autres sources peuvent être des stations de base GNSS locales situées sur le site du projet d'acquisition de données ou à proximité, ou des stations de référence à fonctionnement continu (CORS) existantes, généralement proposées par des agences gouvernementales et/ou des fournisseurs de réseaux CORS commerciaux.
Un logiciel de post-traitement cinématique (PPK) peut utiliser des informations librement disponibles sur l'orbite et l'horloge des satellites GNSS, afin d'améliorer encore la précision. Le PPK permet de déterminer avec précision l'emplacement d'une station de base GNSS locale dans un cadre de référence de coordonnées globales absolues, qui est utilisé pour déterminer l'emplacement d'une station de base GNSS locale dans un cadre de référence de coordonnées globales absolues, qui est utilisé.
Le logiciel PPK peut également prendre en charge des transformations complexes entre différents cadres de référence de coordonnées dans le cadre de projets d'ingénierie.
En d'autres termes, il donne accès aux corrections, améliore la précision du projet et peut même réparer les pertes de données ou les erreurs pendant l'enquête ou l'installation après la mission.
Quelle est la différence entre RTK et PPK ?
La cinématique en temps réel (RTK) est une technique de positionnement dans laquelle les corrections GNSS sont transmises en temps quasi réel, généralement à l'aide d'un flux de correction au format RTCM. Cependant, il peut être difficile de garantir les corrections GNSS, en particulier leur exhaustivité, leur disponibilité, leur couverture et leur compatibilité.
Le principal avantage du PPK par rapport au post-traitement RTK est que les activités de traitement des données peuvent être optimisées pendant le post-traitement, y compris le traitement en avant et en arrière, alors que dans le traitement en temps réel, toute interruption ou incompatibilité dans les corrections et leur transmission entraînera un positionnement de moindre précision.
Le premier avantage du post-traitement GNSS (PPK) par rapport au temps réel (RTK) est que le système utilisé sur le terrain n'a pas besoin d'une liaison de données/radio pour transmettre les corrections RTCM provenant du CORS au système INS/GNSS.
La principale limite à l'adoption du post-traitement est l'obligation pour l'application finale d'agir sur l'environnement. En revanche, si votre application peut supporter le temps de traitement supplémentaire nécessaire à la production d'une trajectoire optimisée, elle améliorera considérablement la qualité des données pour tous vos produits.
Comment fonctionne le traitement en amont et en aval ?
Imaginons que nous ayons une panne GNSS de 60 secondes au milieu de notre enquête. L'erreur de position dans le traitement en amont augmente rapidement (le taux dépend des spécifications du site IMU et d'autres paramètres) et atteint son maximum à la fin de la panne. Elle se rétablit ensuite rapidement. Dans le traitement a posteriori, nous prétendons que le temps s'écoule en arrière et nous effectuons le traitement dans l'ordre anti-chronologique, car les équations physiques restent valables. Dans ce traitement à rebours, l'erreur serait maximale au début réel de la panne du GNSS, de manière très symétrique au traitement naturel à rebours.
La fusion de ces deux calculs permet d'obtenir une erreur maximale autour du milieu de la panne, avec une ampleur beaucoup plus faible que les solutions en avant seulement ou en arrière seulement. Cela améliorera particulièrement les solutions GNSS+INS , comme le permettent les produits SBG Systems , mais le traitement GNSS seulement bénéficiera également de ce flux de travail.
Comme nous l'avons déjà indiqué, cette amélioration ne peut se faire que par le biais d'un post-traitement, car toutes les données doivent être disponibles du début à la fin, ce qui reporte son utilisation à la fin de l'enquête.
Qu'est-ce que le géoréférencement en topographie aérienne ?
Le géoréférencement consiste à aligner des données géographiques (telles que des cartes, des images satellites ou des photographies aériennes) sur un système de coordonnées connu afin de pouvoir les placer avec précision sur la surface de la Terre.
Les données peuvent ainsi être intégrées à d'autres informations spatiales, ce qui permet une analyse et une cartographie précises basées sur la localisation.
Dans le contexte de l'arpentage, le géoréférencement est essentiel pour garantir que les données collectées par des outils tels que le LiDAR, les caméras ou les capteurs sur les drones sont cartographiées avec précision en fonction des coordonnées du monde réel.
En attribuant la latitude, la longitude et l'altitude à chaque point de données, le géoréférencement garantit que les données capturées reflètent l'emplacement et l'orientation exacts sur la Terre, ce qui est crucial pour des applications telles que la cartographie géospatiale, la surveillance de l'environnement et la planification de la construction.
Le géoréférencement implique généralement l'utilisation de points de contrôle dont les coordonnées sont connues, souvent obtenues par GNSS ou par levés au sol, afin d'aligner les données capturées sur le système de coordonnées.
Ce processus est essentiel pour créer des séries de données spatiales précises, fiables et utilisables.
