Ellipse-D alimenter un camion autopiloté
EllipseCamion autopiloté doté d'un système d'entraînement et de direction à roues indépendantes.
"Le site-D de SBG Systems était facile à utiliser, très précis et stable, avec un petit facteur de forme - autant d'éléments essentiels pour le développement de notre WATonoTruck." | Amir K., professeur et directeur, Université de Waterloo

Nous savons tous que les accidents de la route sont dus à des erreurs de conduite, à des conditions météorologiques défavorables ou à des dysfonctionnements du véhicule. Mais que se passerait-il si nous pouvions faire en sorte que les véhicules se conduisent d'eux-mêmes, en évitant ces accidents ? Par exemple, un camion ou une voiture autonome.
C'est l'idée derrière les véhicules autonomes, et le Mechatronic Vehicle Systems (MVS) Lab de l'université de Waterloo travaille sur un projet appelé WATonoTruck (WATerloo atonomous Truck).
Il s'agit d'un camion à plate-forme autonome conçu pour la manutention lourde, l'agriculture et les applications de service. Il utilise des méthodes de contrôle avancées pour analyser les mouvements du camion, en particulier dans des conditions dangereuses ou des scénarios de dysfonctionnement, afin de garantir la sécurité et l'efficacité.
Le laboratoire vise à étendre l'application de la technologie des véhicules autonomes au-delà du transport de passagers. Il souhaite l'utiliser dans d'autres secteurs tels que l'agriculture, l'exploitation minière et le transport maritime, afin d'accroître l'efficacité et de réduire les temps d'arrêt.
Rencontrez WATonoTruck
Un camion qui n'a pas besoin de chauffeur - c'est le WATonoTruck ! Il s'agit d'un camion à plate-forme autopiloté doté d'un système de conduite et de direction à roues indépendantes. Il est construit sur la plateforme du module d'angle (CM).
Les CM ont été développés dans l'optique d'une conception modulaire des véhicules et peuvent être installés sur n'importe quel châssis dans n'importe quelle configuration.
Chaque CM fonctionne comme un véhicule électrique à roue unique équipé de sa propre unité de contrôle. Il peut fonctionner indépendamment des systèmes d'entraînement, de freinage, de direction et de suspension.
Cela rend le camion super intelligent et adaptable à n'importe quelle application et n'importe quel terrain.
WATonoTruck renforcé par Ellipse-D
En tant que leader dans le domaine des solutions de positionnement et de navigation de haute précision, nous sommes fiers de collaborer avec le Mechatronic Vehicle Systems Lab de l'Université de Waterloo.
Nous fournissons Ellipse-D , un RTK à double antenne INS, offrant une précision inégalée en matière de position et de cap.
Ce niveau de précision est crucial pour la navigation autonome, assurant le déplacement sûr et précis du WATonoTruck, même dans des environnements difficiles.
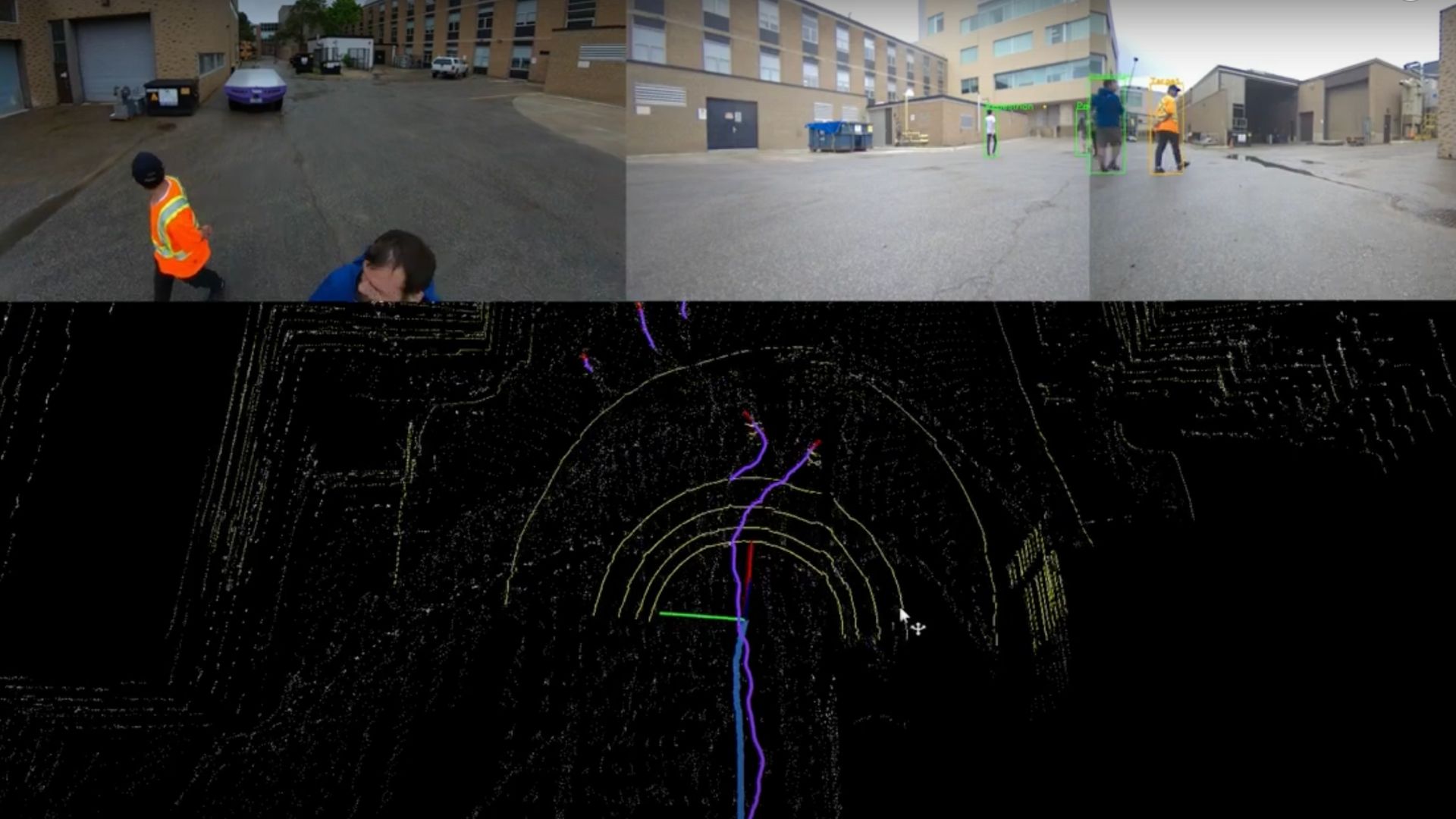
Ellipse-D (3e génération), des capteurs LiDAR et des caméras avancées - cette suite complète de capteurs permet de cartographier l'environnement en temps réel, de détecter les obstacles et de planifier la trajectoire.
Grâce à notre parrainage, le développement du WATonoTruck par le laboratoire bénéficie d'un soutien vital en termes de mouvements et de navigation de haute précision auxquels il peut faire confiance.
Cette collaboration contribue non seulement au développement réussi du WATonoTruck, mais favorise également la croissance des applications de véhicules autonomes dans tous les secteurs, favorisant l'innovation et la sécurité dans les transports et au-delà.

Ellipse-D
Le Ellipse-D est un système de navigation inertielle intégrant une double antenne et une double fréquence RTK GNSS compatible avec notre logiciel de post-traitement Qinertia.
Conçu pour les applications robotiques et géospatiales, il peut fusionner l'entrée Odomètre avec Pulse ou CAN OBDII pour améliorer la précision de la navigation.

Demandez un devis pour Ellipse-D
Avez-vous des questions ?
Bienvenue dans notre section FAQ ! Vous y trouverez les réponses aux questions les plus courantes concernant les applications que nous présentons. Si vous ne trouvez pas ce que vous cherchez, n'hésitez pas à nous contacter directement !
Quelle est la différence entre RTK et PPK ?
La cinématique en temps réel (RTK) est une technique de positionnement dans laquelle les corrections GNSS sont transmises en temps quasi réel, généralement à l'aide d'un flux de correction au format RTCM. Cependant, il peut être difficile de garantir les corrections GNSS, en particulier leur exhaustivité, leur disponibilité, leur couverture et leur compatibilité.
Le principal avantage du PPK par rapport au post-traitement RTK est que les activités de traitement des données peuvent être optimisées pendant le post-traitement, y compris le traitement en avant et en arrière, alors que dans le traitement en temps réel, toute interruption ou incompatibilité dans les corrections et leur transmission entraînera un positionnement de moindre précision.
Le premier avantage du post-traitement GNSS (PPK) par rapport au temps réel (RTK) est que le système utilisé sur le terrain n'a pas besoin d'une liaison de données/radio pour transmettre les corrections RTCM provenant du CORS au système INS/GNSS.
La principale limite à l'adoption du post-traitement est l'obligation pour l'application finale d'agir sur l'environnement. En revanche, si votre application peut supporter le temps de traitement supplémentaire nécessaire à la production d'une trajectoire optimisée, elle améliorera considérablement la qualité des données pour tous vos produits.
Qu'est-ce que le positionnement ponctuel précis ?
Le positionnement ponctuel précis (PPP) est une technique de navigation par satellite qui offre un positionnement de haute précision en corrigeant les erreurs du signal satellite. Contrairement aux méthodes GNSS traditionnelles, qui reposent souvent sur des stations de référence au sol (comme dans le cas du RTK), le PPP utilise des données satellitaires globales et des algorithmes avancés pour fournir des informations de localisation précises.
Le PPP fonctionne partout dans le monde sans qu'il soit nécessaire de disposer de stations de référence locales. Il convient donc aux applications dans des environnements éloignés ou difficiles où il n'y a pas d'infrastructure au sol. En utilisant des données précises sur l'orbite et l'horloge des satellites, ainsi que des corrections pour les effets atmosphériques et les trajets multiples, le PPP minimise les erreurs GNSS courantes et peut atteindre une précision de l'ordre du centimètre.
Si le PPP peut être utilisé pour le positionnement post-traitement, qui implique l'analyse a posteriori des données collectées, il peut également fournir des solutions de positionnement en temps réel. Le PPP en temps réel (RTPPP) est de plus en plus disponible et permet aux utilisateurs de recevoir des corrections et de déterminer leur position en temps réel.
