







Qinertia GNSS+INS Software de postprocesamiento (PPK)
Precision Made Simple
Bienvenido a la vanguardia de la innovación geoespacial. Qinertia El software PPK ofrece un nivel completamente nuevo en soluciones de posicionamiento de alta precisión. En un mundo que exige precisión sin concesiones, nuestro software PPK se está convirtiendo en la piedra angular para los profesionales y las industrias que buscan una confianza sin precedentes en sus datos de localización.
Software de posprocesamiento que funciona de verdad
Consiga una precisión sin precedentes en sus flujos de trabajo mediante el posprocesamiento de sus datos de localización sin procesar. Qinertia es crucial en aplicaciones que requieren una precisión a nivel centimétrico, como las geoespaciales cartografía, la cartografía o la hidrografía.





Gama de aplicaciones
INS
Funcionalidades
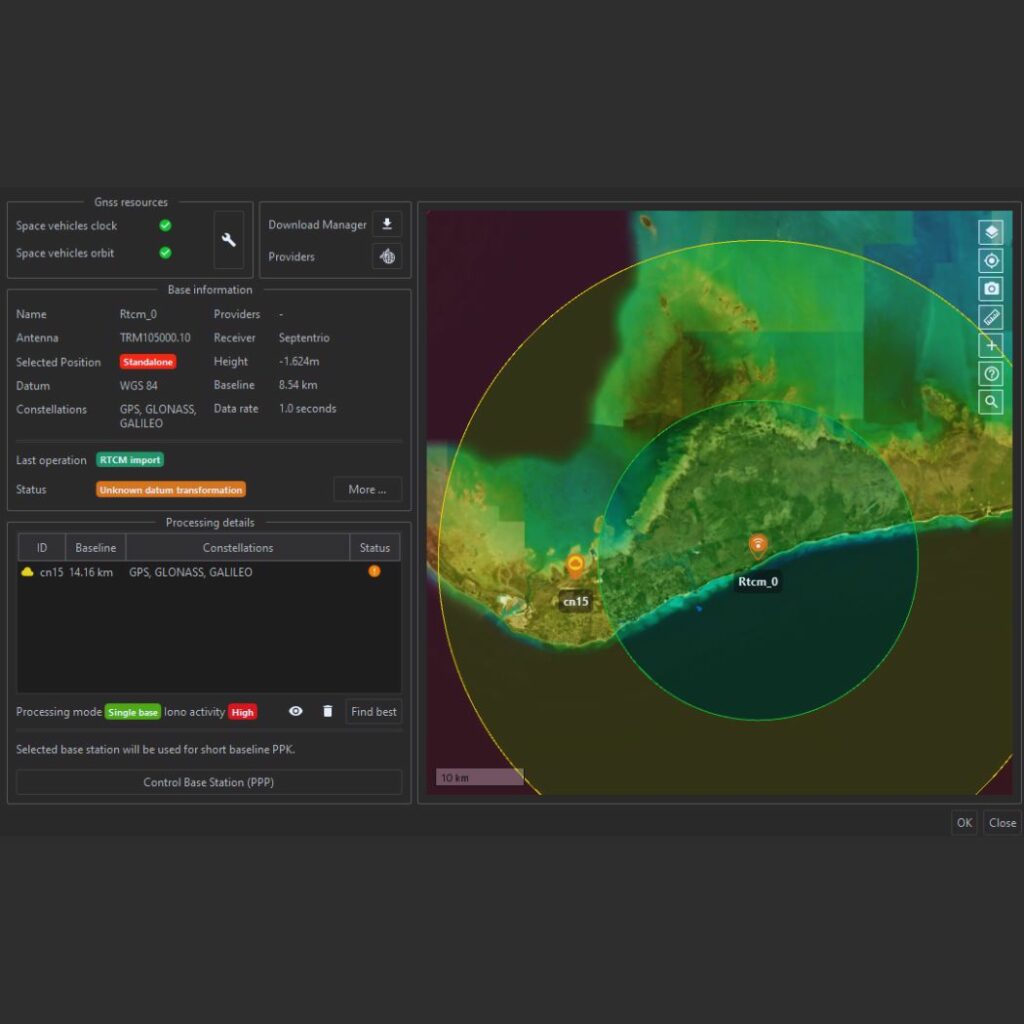
Mapa de cobertura de las estaciones base
Increíblemente fácil de usar, pero también muy versátil. Con una amplia selección de Sistemas de Referencia de Coordenadas (SRC) preconfigurados
Nuevo motor geodésico
El nuevo motor geodésico de Qinertia cuenta con un exhaustivo conjunto de herramientas que no sólo son increíblemente fáciles de usar, sino también muy versátiles.
Con una amplia selección de Sistemas de Referencia de Coordenadas (CRS) preconfigurados, Qinertia le permite aprovechar los sistemas oficiales y transformaciones esenciales para sus proyectos. También puede crear transformaciones personalizadas adaptadas a sus necesidades específicas o científicas.
Modo IonoShield
El modo IonoShield de Qinertia revoluciona la forma de gestionar la actividad ionosférica en sus registros. Supervisar las condiciones ionosféricas nunca ha sido tan fácil.
Ahora, podrá evaluar sin esfuerzo la actividad ionosférica y la longitud de la línea de base, lo que le permitirá tomar decisiones informadas sobre el modo de procesamiento óptimo para sus datos.
Integración CORS ampliada
Ahora puede acceder a la red SmartNet CORS, con su impresionante cobertura mundial de 5300 estaciones base (requiere suscripción adicional).
El acceso Smartnet está perfectamente integrado en Qinertia, lo que le garantiza la flexibilidad y comodidad necesarias para aprovechar esta tecnología de la forma que más le convenga.
PPK con RTCM en directo
Ahora puede conseguir una precisión sin precedentes en sus flujos de trabajo PPK procesando sus datos con correcciones RTCM que se utilizan en operaciones en tiempo real. Es importante tener en cuenta que esta función está diseñada específicamente para escenarios de base única en tiempo real y es incompatible con configuraciones VBS.
RTCM Stream en Qinertia redefine la precisión y ofrece más opciones para su PPK.

Explore nuestras estaciones base
Qinertia confían en una red de más de 10.000 estaciones base en 164 países para mejorar la precisión GNSS. Explore las estaciones en el sitio web MySBG.
PPK, más fácil para obtener resultados precisos
Nuestro software de postprocesamiento PPK ofrece una experiencia fluida a todos los usuarios gracias a su interfaz intuitiva y sus flujos de trabajo guiados. La rápida configuración del proyecto, la introducción de datos mediante arrastrar y soltar y la selección automática de la mejor estación base simplifican las tareas, mientras que las opciones avanzadas están pensadas para los expertos. Las actualizaciones periódicas basadas en los comentarios de los usuarios garantizan una mejora continua y una funcionalidad centrada en el usuario.

Gestión de la estación base
- Hasta 10.000 estaciones base en 164 países directamente disponibles en Qinertia.
- Al importar su propia estación base, la función de control de la estación base PPP le ayuda a verificar su posición con precisión.

Modos de procesamiento PPK
- Línea de base corta de estación base única.
- Modo de estación base única Ionoshield .
- Estación base virtual para la cartografía de corredores.
- APP fuertemente acoplada en cualquier parte del mundo.

Software orientado al usuario
- Una interfaz moderna y fácil de usar que le permitirá empezar a trabajar en cuestión de minutos.
- Potentes herramientas para los usuarios más avanzados.
- Se actualiza periódicamente con nuevas funciones basadas en los comentarios de los usuarios.

Fácil integración del flujo de trabajo
Para desarrolladores de software. Utilice Qinertia Cloud APIs o Qinertia CLI para liberar el poder de PPK en su Software:
- Interfaz gráfica fácil de usar.
- CLI para el tratamiento recurrente de datos.
- Salidas e informes generados totalmente personalizables.
Más funciones
Experimente un enfoque transformador del procesamiento de datos GNSS con el software Qinertia PPK de SBG Systems: sus potentes funciones están diseñadas específicamente para elevar sus operaciones a nuevas cotas.

Visualización y ajustes avanzados del GNSS
Qinertia mejora automáticamente la precisión de su PPK excluyendo de forma inteligente los satélites con mala calidad de señal, garantizando que en sus cálculos sólo se utilicen los datos de mayor calidad. Además, los usuarios tienen ahora la flexibilidad de tomar cartas en el asunto desactivando manualmente satélites individuales, bandas de señal completas o incluso constelaciones enteras dentro de sus soluciones PPK.
Para apoyar estas funciones avanzadas, hemos introducido una serie de gráficos informativos que le permiten evaluar fácilmente la calidad de la señal GNSS. Disfrute de un control y una confianza totales en sus datos GNSS con la configuración y visualización avanzadas de GNSS en Qinertia.
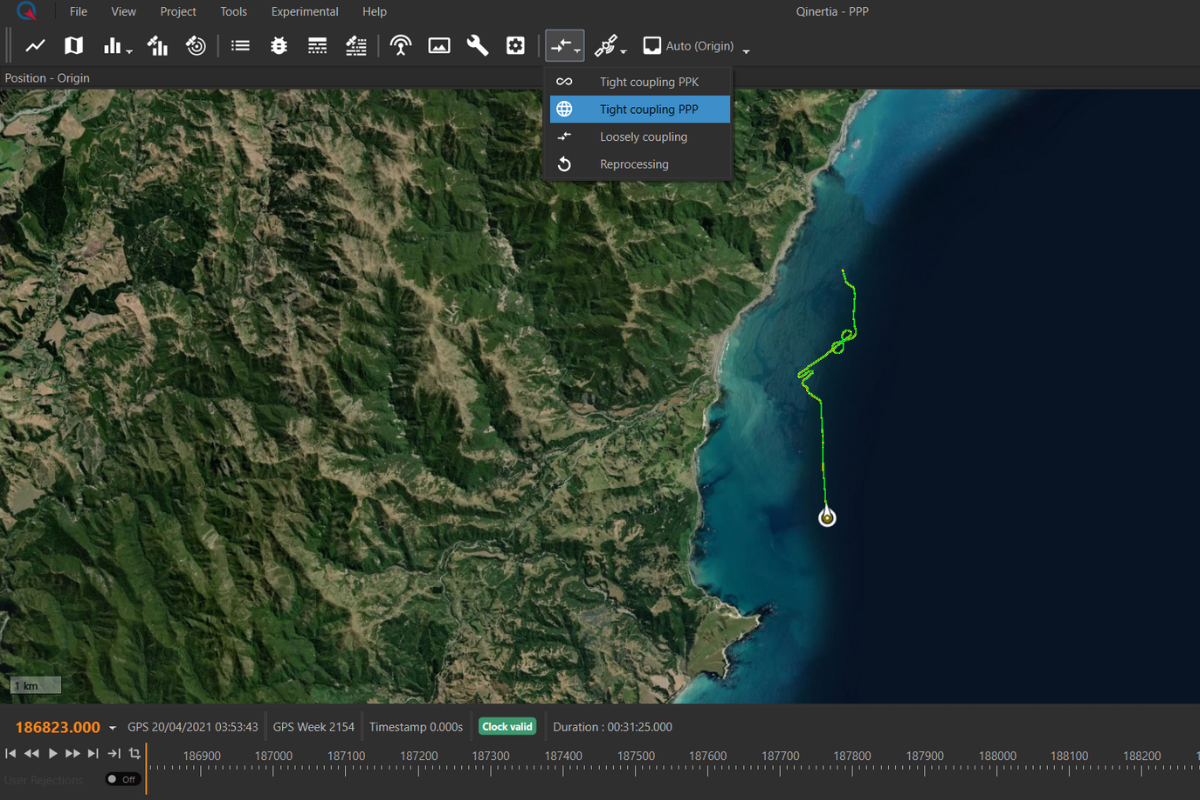
APP estrechamente vinculada
El PPP de acoplamiento apretado en Qinertia está ahora disponible sólo 24 horas después de su misión. La integración del algoritmo SBG PPP con acoplamiento estrecho eleva la precisión del cálculo a un nuevo nivel.
No sólo aumenta su capacidad en tiempo real, sino que también mejora significativamente el análisis de datos posterior a la misión.
Modo de antena única peatonal
Una función revolucionaria diseñada para mejorar su experiencia en escenarios poco dinámicos y casos de uso con una sola antena.
Bajo el perfil de movimiento Pedestrian, Qinertia alinea sin esfuerzo su cabo, garantizando una precisión óptima incluso en situaciones de baja dinámica y desbloquea un mundo de posibilidades para el mapeado de mochilas. Alineación peatonal, una nueva solución que estabas esperando.
Nuestras diferentes ediciones
Elija la edición perfecta del software Qinertia PPK que se adapte a las necesidades de su proyecto. Tanto si está trabajando en una infraestructura a gran escala cartografía, en cartografía de alta precisión o en cualquier proyecto que requiera un posprocesamiento GNSS preciso, Qinertia le ofrece opciones flexibles.
Cada edición le proporciona potentes funciones para procesar sus datos GNSS sin procesar y lograr una precisión a nivel centimétrico en tan solo unos clics.
| Tipo de tratamiento | Tipo de procesamiento Sólo GNSS | Tipo de procesamiento Inercial + GNSS | Tipo de procesamiento Inercial + GNSS | Tipo de procesamiento Inercial + GNSS |
|---|---|---|---|---|
| SBG IMU's apoyado | SBG IMU's apoyado - | SBG IMU's compatible Ellipse Sólo | SBG IMU's apoyado Ellipse & Quanta Series (Quanta Micro /Plus/Extra) | SBG IMU's compatible Todas las IMU de SBG y de terceros |
| Terceros IMU | Terceros IMU - | Terceros IMU - | Terceros IMU - | Terceros IMU ● |
| Aplicaciones | Aplicaciones Todas | Aplicaciones Land/Air | Aplicaciones Aire | Aplicaciones Todas |
| Licencia | Licencia Perpetua o suscripción | Licencia Perpetua o suscripción | Licencia Perpetua o suscripción | Licencia Perpetua o suscripción |
| Procesamiento simultáneo | Procesamiento simultáneo 1 | Procesamiento simultáneo 1 | Procesamiento simultáneo 1 | Procesamiento simultáneo 1 |
| Tratamiento offline | Procesamiento fuera de línea ● | Procesamiento fuera de línea ● | Procesamiento fuera de línea ● | Procesamiento fuera de línea ● |
| Procesamiento del servidor | Procesamiento del servidor - | Procesamiento del servidor - | Procesamiento del servidor - | Procesamiento del servidor - |
| Interfaz | Interfaz GUI + CLI | Interfaz GUI + CLI | Interfaz GUI + CLI | Interfaz GUI + CLI |
| Perfil de movimiento | Perfil de movimiento Estático (GNSS), Aéreo (UAV, Avión, Helicóptero), Terrestre (Automóvil, camión, ferrocarril), Marítimo (Marítimo, Levantamiento marino duro y Marítimo submarino), Peatonal | Perfil de movimiento Estático (GNSS), Aéreo (UAV, avión, helicóptero), Terrestre (automóvil, camión, ferrocarril), Peatón | Perfil de movimiento Estático (GNSS), Aéreo (UAV, Avión, Helicóptero) | Perfil de movimiento Estático (GNSS), Aéreo (UAV, Avión, Helicóptero), Terrestre (Automóvil, camión, ferrocarril), Marítimo (Marítimo, Levantamiento marino duro y Marítimo submarino), Peatonal |
| Acoplamiento estrecho RTK&VBS&PPP | Acoplamiento estrecho RTK&VBS&PPP - | Acoplamiento estrecho RTK&VBS&PPP ● | Acoplamiento estrecho RTK&VBS&PPP ● | Acoplamiento estrecho RTK&VBS&PPP ● |
| Reprocesamiento | Reprocesamiento - | Reprocesamiento ● | Reprocesamiento ● | Reprocesamiento ● |
| Acoplamiento flexible | Acoplamiento flexible - | Acoplamiento flexible ● | Acoplamiento flexible ● | Acoplamiento flexible ● |
| GNSS RTK&VBS&PPP | GNSS RTK&VBS&PPP ● | GNSS RTK&VBS&PPP ● | GNSS RTK&VBS&PPP ● | GNSS RTK&VBS&PPP ● |
| Gestión de la estación base | Gestión de la estación base ● | Gestión de la estación base ● | Gestión de la estación base ● | Gestión de la estación base ● |
| Motor geodésico | Motor geodésico ● | Motor geodésico ● | Motor geodésico ● | Motor geodésico ● |
| IonoShield | IonoShield ● | IonoShield ● | IonoShield ● | IonoShield ● |
| Red CORS | Red CORS ● | Red CORS ● | Red CORS ● | Red CORS ● |
| Informe | Informe ● | Informe ● | Informe ● | Informe ● |
| Diagnóstico Rinex | Diagnóstico Rinex ● | Diagnóstico Rinex ● | Diagnóstico Rinex ● | Diagnóstico Rinex ● |
| Estimación del brazo de palanca | Estimación del brazo de palanca ● | Estimación del brazo de palanca ● | Estimación del brazo de palanca ● | Estimación del brazo de palanca ● |
| Estadísticas | Estadísticas ● | Estadísticas ● | Estadísticas ● | Estadísticas ● |



Construya su propia solución
Qinertia es el software de posprocesamiento INS/GNSS de nueva generación pensado para todos los usuarios, ya sean particulares, empresas, integradores de sistemas, editores de software o proveedores de servicios.
Los perfiles de movimiento de aplicaciones preconfigurados simplifican la configuración y optimizan el rendimiento para sus necesidades específicas.
Elija entre todas las soluciones disponibles y hágala suya: de sobremesa, OEM y cloud.

Implantaciones sencillas
Qinertia Desktop es una aplicación de escritorio diseñada para manejar eficazmente conjuntos de datos complejos mediante herramientas de análisis avanzadas y ajustes personalizables.
Con su interfaz de fácil manejo, le permite importar, procesar y analizar rápidamente sus datos.
Ideal para usuarios individuales o equipos que trabajan en la oficina.

Integración perfecta con su hardware o software
Qinertia OEM ofrece un proceso de integración sin problemas, lo que le permite integrar el potente procesamiento PPK en sus soluciones, ofreciendo a sus clientes un posicionamiento de alta precisión fiable y eficaz con facilidad, tanto si es fabricante de hardware como integrador de sistemas o proveedor de servicios.
Puede personalizar la interfaz, los flujos de trabajo y las funciones del software para adaptarlos a su marca y a las necesidades de los usuarios.

Permita una gestión flexible, escalable y remota.
Qinertia Cloud está diseñado para desarrolladores, integradores y empresas que buscan una solución PPK escalable que ofrezca todo el potencial de un posprocesamiento preciso con la comodidad y flexibilidad de la tecnología basada en cloud.
Tanto si está creando una aplicación personalizada, ofreciendo servicios en línea o ampliando sus capacidades actuales, Qinertia Cloud API le garantiza que podrá ofrecer un rendimiento PPK de primer nivel a sus usuarios.
Compatible con numerosos receptores de terceros
Qinertia es compatible con receptores de terceros que pueden proporcionar datos GNSS sin procesar*, incluidos: Receptores GNSS Septentrio, Trimble, Novatel, Ublox, Topcon, Javad, Ashtec, Spectra...
Obtenga acceso a todas las funciones de Qinertia : Análisis sintáctico de los formatos de archivo del receptor GNSS, GNSS PPK, opcionalmente con acoplamiento inercial, GNSS PPP, opcionalmente con acoplamiento inercial, Toda la visualización de gráficos y análisis, PPK realizado utilizando todas las constelaciones de banda disponibles y mucho más...
*Receptores GNSS compatibles: doble banda y superiores (L1, L1+L2, L1+L5, L1+L2+L5).
Documentación y recursos
Todas las soluciones de Qinertia incluyen documentación completa, diseñada para ayudar a los usuarios en cada paso.
Desde guías de instalación hasta configuración avanzada y resolución de problemas, nuestros manuales claros y detallados garantizan una integración y un funcionamiento sin problemas.
La nueva generación de software PPK.
Manual del usuario en líneaEncontrará artículos prácticos, vídeos y la documentación completa del programa.
Acceda a su cuenta MySBGEntra para ver las novedades de tu cuenta MySBG. Mantente al día de las últimas novedades sobre tus productos y de toda la información sobre cómo crear sin problemas Claves API para utilizar nuestros Servicios.
Compruebe el estado del servidor QinertiaManténgase informado sobre el estado de su servidor Qinertia . Obtenga información completa sobre : Tiempo de actividad, tiempo total de actividad, tiempo de respuesta y eventos recientes en su software Qinertia .
Visita guiada a Qinertia
Embárquese en una visita detallada de nuestro software de postprocesamiento con Lea, nuestra responsable de producto Qinertia .

Solicite una demostración de Qinertia
Explore casos de uso reales
Descubra cómo nuestro software de posprocesamiento, Qinertia GNSS+INS, ayuda a los profesionales de diversos sectores. Desde la georreferenciación precisa en la cartografía de vehículos aéreos no tripulados hasta la mejora de la navegación en entornos difíciles, nuestros casos prácticos muestran cómo Qinertia ofrece una precisión y eficiencia sin precedentes.
Descubra cómo nuestros clientes aprovechan Qinertia para superar retos, optimizar el rendimiento y lograr resultados excepcionales.



Hablan de nosotros
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat.
Preguntas frecuentes sobre software de posprocesamiento
Nuestra sección de preguntas frecuentes sobre software de posprocesamiento ofrece respuestas completas a las preguntas más habituales sobre SBG Systems' herramientas avanzadas de posprocesamiento.
En esta sección encontrará explicaciones detalladas sobre la funcionalidad, integración y ventajas de nuestras soluciones de posprocesamiento. Si necesita ayuda para optimizar su flujo de trabajo, comprender la compatibilidad o solucionar problemas, esta sección de preguntas frecuentes le ofrece información valiosa para ayudarle a maximizar el rendimiento de nuestro software en sus proyectos.
Explore las respuestas y aumente su eficacia operativa con soluciones fiables de procesamiento de datos.
¿Qué es el postprocesamiento GNSS?
El postprocesamiento GNSS, o PPK, es un enfoque en el que las mediciones de datos GNSS sin procesar registradas en un receptor GNSS se procesan después de la actividad de adquisición de datos. Pueden combinarse con otras fuentes de mediciones GNSS para proporcionar la trayectoria cinemática más completa y precisa para ese receptor GNSS, incluso en los entornos más difíciles.
Estas otras fuentes pueden ser estaciones base GNSS locales en o cerca del proyecto de adquisición de datos, o estaciones de referencia de funcionamiento continuo (CORS) existentes ofrecidas normalmente por agencias gubernamentales y/o proveedores de redes CORS comerciales.
Un software cinemático de posprocesamiento (PPK) puede hacer uso de la información sobre la órbita y el reloj de los satélites GNSS disponible gratuitamente, para ayudar a mejorar aún más la precisión. El PPK permite determinar con precisión la ubicación de una estación base GNSS local en un marco de referencia de coordenadas global absoluto, que se utiliza.
El software PPK también admite transformaciones complejas entre distintos marcos de referencia de coordenadas en apoyo de proyectos de ingeniería.
En otras palabras, da acceso a correcciones, mejora la precisión del proyecto e incluso puede reparar pérdidas de datos o errores durante la cartografía o la instalación después de la misión.
¿Cuál es la diferencia entre RTK y PPK?
La cinemática en tiempo real (RTK) es una técnica de posicionamiento en la que las correcciones GNSS se transmiten casi en tiempo real, normalmente utilizando un flujo de corrección en formato RTCM. Sin embargo, garantizar las correcciones GNSS, en concreto su integridad, disponibilidad, cobertura y compatibilidad, puede plantear problemas.
La principal ventaja del PPK sobre el postprocesamiento RTK es que las actividades de procesamiento de datos pueden optimizarse durante el postprocesamiento, incluido el procesamiento hacia delante y hacia atrás, mientras que en el procesamiento en tiempo real, cualquier interrupción o incompatibilidad en las correcciones y su transmisión dará lugar a un posicionamiento de menor precisión.
Una primera ventaja clave del postprocesamiento GNSS (PPK) frente al tiempo real (RTK) es que el sistema utilizado sobre el terreno no necesita disponer de un enlace de datos/radio para introducir las correcciones RTCM procedentes del CORS en el sistema INS/GNSS.
La principal limitación a la adopción del postprocesado es la exigencia de que la aplicación final actúe sobre el entorno. Por otro lado, si su aplicación puede soportar el tiempo de procesamiento adicional necesario para producir una trayectoria optimizada, mejorará enormemente la calidad de los datos de todos sus entregables.
¿Cómo funciona el procesamiento hacia delante y hacia atrás?
Imaginemos que tenemos una interrupción del GNSS de 60 segundos en medio de nuestro estudio. El error de posición en el procesamiento hacia delante crece rápidamente (la tasa depende de las especificaciones de IMU y de otros parámetros) y alcanza su máximo al final de la interrupción. Después se recupera rápidamente. En el postprocesamiento, fingimos que el tiempo fluye hacia atrás y realizamos el procesamiento en orden anticronológico, ya que las ecuaciones físicas siguen siendo válidas. En este procesamiento hacia atrás, el error sería máximo al comienzo real de la interrupción del GNSS de forma muy simétrica al procesamiento natural hacia delante.
La fusión de estos dos cálculos da como resultado un error máximo en torno a la mitad de la interrupción, con una magnitud mucho menor que las soluciones sólo hacia delante o sólo hacia atrás. Esto mejorará especialmente las soluciones GNSS+INS tal y como permiten los productos SBG Systems , pero el procesamiento sólo GNSS también se beneficiará de este flujo de trabajo.
Como ya se ha dicho, esta mejora sólo puede hacerse mediante posprocesamiento, ya que se necesita disponer de todos los datos de principio a fin, por lo que se retrasa su uso hasta el final de la cartografía.
¿Qué es la georreferenciación en la antena cartografía?
La georreferenciación es el proceso de alinear datos geográficos (como mapas, imágenes de satélite o fotografías aéreas) con un sistema de coordenadas conocido para poder situarlos con precisión en la superficie terrestre.
Esto permite integrar los datos con otra información espacial, lo que posibilita un análisis y una cartografía precisos basados en la localización.
En el contexto de cartografía, la georreferenciación es esencial para garantizar que los datos recogidos por herramientas como LiDAR, cámaras o sensores en drones se cartografían con precisión en coordenadas del mundo real.
Al asignar latitud, longitud y elevación a cada punto de datos, la georreferenciación garantiza que los datos capturados reflejen la ubicación y orientación exactas en la Tierra, lo que resulta crucial para aplicaciones como la cartografía geoespacial, la vigilancia del medio ambiente y la planificación de obras.
La georreferenciación suele implicar el uso de puntos de control con coordenadas conocidas, a menudo obtenidos mediante GNSS o en tierra cartografía, para alinear los datos capturados con el sistema de coordenadas.
Este proceso es vital para crear conjuntos de datos espaciales precisos, fiables y utilizables.
