Cartografía móvil basada en SLAM
Cartografía móvil basada en SLAM
El vMS3D es un sistema de cartografía móvil que combina lo mejor de las tecnologías inercial, GNSS y SLAM.
"Ellipse INS proporciona datos de velocidad muy, muy precisos". | Sr. Ninot, Fundador de VIAMETRIS

VIAMETRIS es precursora en el desarrollo de soluciones basadas en SLAM. Hace dos años, la empresa lanzó el iMS3D, un sistema de cartografía en interiores basado en la tecnología SLAM.
Aprovechando esta experiencia, la empresa acaba de lanzar una nueva solución: el vMS3D, un sistema de cartografía móvil que combina lo mejor de las tecnologías inercial, GNSS y SLAM para ofrecer una solución innovadora con una atractiva relación prestaciones/precio.
El sistema de cartografía móvil más inteligente
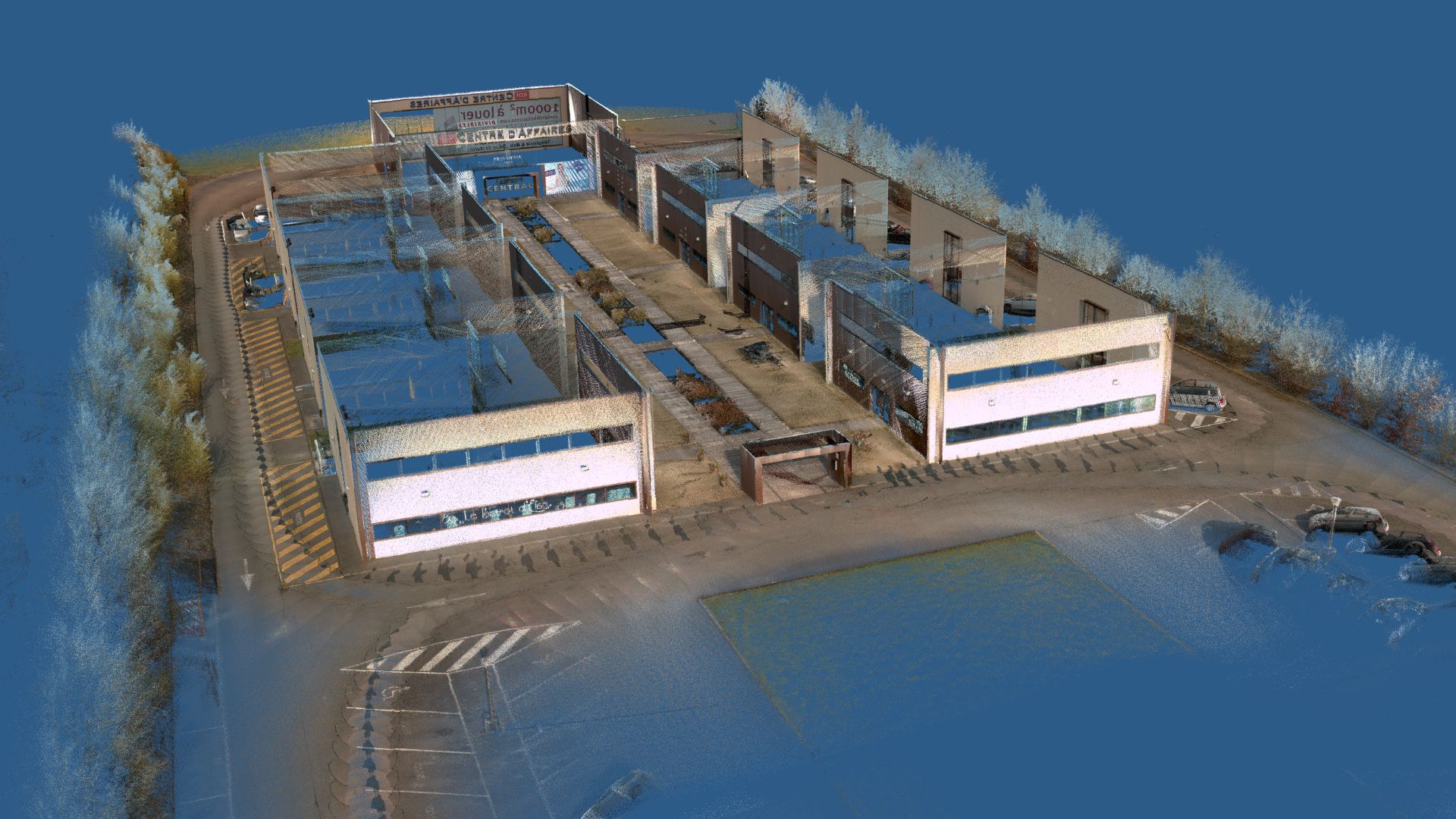
vMS3D parece un sistema clásico de cartografía móvil (MMS). Integra una cámara de 360°, un LiDAR giratorio y un sistema de navegación interno con receptor GNSS.
El sencillo flujo de trabajo automático no muestra el sutil y sofisticado cálculo interno que lo hace único. De hecho, el vMS3D está equipado con un LiDAR adicional que se utiliza para el cálculo SLAM.
Tras la adquisición, el software de posprocesamiento -denominado PPiMMS- analiza automáticamente las situaciones en las que el GNSS es suficiente, en las que se prefiere el sistema inercial o en las que se requiere SLAM.
Lo mejor de GNSS, inercial y SLAM
La solución vMS3D tiene en cuenta las ventajas e inconvenientes de cada tecnología, en función de sus condiciones de uso:
- GNSS: cuando el receptor GNSS proporciona datos fiables, por ejemplo en entornos de cielo abierto, la solución se basa en su posición. Si se produce una interrupción o perturbación del GNSS, el sistema elige entre datos inerciales o basados en SLAM.
- SLAM: La posición calculada a partir de SLAM es preferible en entornos densos donde los objetos circundantes son muy diversos y están muy cerca, como en cañones urbanos o bosques. Las capacidades SLAM son limitadas en entornos donde los objetos están demasiado lejos o no se distinguen.
- Inerciales: Las velocidades y la información de orientación proporcionadas por el Sistema de Navegación Inercial (INS) son capaces de ayudar a la navegación en todos los casos en los que GNSS y SLAM son limitados. El Sistema de Navegación Inercial proporciona balanceo y cabeceo para restringir todos los datos LiDAR, de modo que el punto cloud está referenciado a nivel del suelo. Los índices de giro también son muy útiles, especialmente cuando se produce un cambio brusco de dirección. De hecho, es necesario compensar la orientación entre dos exploraciones cuando el LiDAR está en movimiento.
Ellipse-DLa elección inteligente de VIAMETRIS
Jérôme Ninot, fundador de VIAMETRIS, ya estaba muy satisfecho con el modelo Ellipse para su iMS3D de interior, por lo que no tuvo que buscar mucho para elegir un INS para su nuevo proyecto innovador.
"Ellipse INS proporciona datos de velocidad muy, muy precisos", afirma el Sr. Ninot.
El innovador cálculo SLAM permite a VIAMETRIS confiar en sensores inerciales en miniatura y rentables, mientras que otros sistemas del mercado requieren sistemas inerciales de mayor precisión. Ellipse Los sensores inerciales proporcionan una actitud de 0,1° de precisión.
El Sr. Ninot también eligió el modelo Ellipse-D por su formato todo en uno y en miniatura, y el receptor GNSS RTK integrado.
"Con un INS integrado como el Ellipse-D , que ofrece una única interfaz de comunicación y sincronización integrada con el GNSS y el LiDAR, hemos podido concentrarnos en nuestra experiencia en SLAM", añade el director general, antes de mencionar que menos cable siempre es una buena opción.
Ellipse-Dun socio para muchas tareas
Integrado en esta innovadora solución, el Ellipse-D realiza varias tareas. En primer lugar, proporciona balanceo y cabeceo para restringir todos los datos LiDAR, de modo que el punto cloud esté referenciado a nivel del suelo.
En segundo lugar, Ellipse-D los índices de giro son muy útiles, especialmente cuando se produce un cambio brusco de dirección. De hecho, es necesario compensar la orientación entre dos escaneos cuando el LiDAR está en movimiento.
Por último, Ellipse-D fusiona en tiempo real la información inercial y GNSS para proporcionar excelentes mediciones de velocidad, que también son muy importantes para asistir continuamente a los algoritmos internos de vMS3D.

Ellipse-D
Ellipse-D es un sistema de navegación inercial que integra un GNSS RTK de doble antena y doble frecuencia compatible con nuestro software de postprocesamiento Qinertia.
Diseñado para aplicaciones robóticas y geoespaciales, puede fusionar la entrada del cuentakilómetros con Pulse o CAN OBDII para mejorar la precisión del punto muerto.

Pida presupuesto para Ellipse-D
¿Tiene alguna pregunta?
Bienvenido a nuestra sección de preguntas frecuentes. Aquí encontrará respuestas a las preguntas más frecuentes sobre las aplicaciones que presentamos. Si no encuentra lo que busca, no dude en escribirnos directamente a contacto .
¿Cómo puedo combinar sistemas inerciales con un LIDAR para cartografiar con drones?
La combinación de sistemas inerciales SBG Systems' con LiDAR para la cartografía con drones mejora la precisión y la fiabilidad en la captura de datos geoespaciales precisos.
A continuación se explica cómo funciona la integración y en qué beneficia a la cartografía basada en drones:
- Método de teledetección que utiliza impulsos láser para medir distancias a la superficie terrestre, creando un mapa 3D detallado del terreno o las estructuras.
- SBG Systems INS combina una unidad de medición inercial ( ) con datos GNSS para proporcionar posicionamiento, orientación (cabeceo, balanceo, guiñada) y velocidad precisos, incluso en entornos sin GNSS.IMU
El sistema inercial de SBG se sincroniza con los datos LiDAR. El INS rastrea con precisión la posición y orientación del dron, mientras que el LiDAR capta los detalles del terreno o de los objetos que hay debajo.
Conociendo la orientación exacta del dron, los datos LiDAR pueden situarse con precisión en el espacio 3D.
El componente GNSS proporciona posicionamiento global, mientras que IMU ofrece datos de orientación y movimiento en tiempo real. La combinación garantiza que, incluso cuando la señal GNSS es débil o no está disponible (por ejemplo, cerca de edificios altos o bosques densos), el INS puede seguir rastreando la trayectoria y la posición del dron, lo que permite una cartografía LiDAR coherente.
¿Qué es el ecosondeo multihaz?
El Sondeo por Eco Multihaz (MBES) es una técnica hidrográfica avanzada cartografía utilizada para cartografiar el fondo marino y las características submarinas con gran precisión.
A diferencia de las ecosondas tradicionales de un solo haz, que miden la profundidad en un único punto directamente bajo el buque, el MBES utiliza un conjunto de haces de sonar para captar simultáneamente mediciones de profundidad en una amplia franja del fondo marino. Esto permite elaborar mapas detallados y de alta resolución del terreno submarino, incluida la topografía, las características geológicas y los peligros potenciales.
Los sistemas MBES emiten ondas sonoras que viajan por el agua, rebotan en el fondo marino y regresan al buque. Analizando el tiempo que tardan en volver los ecos, el sistema calcula la profundidad en múltiples puntos, creando un mapa completo del paisaje submarino.
Esta tecnología es esencial para diversas aplicaciones, como la navegación, la construcción marina, la vigilancia del medio ambiente y la exploración de recursos, ya que proporciona datos fundamentales para la seguridad de las operaciones marítimas y la gestión sostenible de los recursos marinos.
¿Cuál es la diferencia entre RTK y PPK?
La cinemática en tiempo real (RTK) es una técnica de posicionamiento en la que las correcciones GNSS se transmiten casi en tiempo real, normalmente utilizando un flujo de corrección en formato RTCM. Sin embargo, garantizar las correcciones GNSS, en concreto su integridad, disponibilidad, cobertura y compatibilidad, puede plantear problemas.
La principal ventaja del PPK sobre el postprocesamiento RTK es que las actividades de procesamiento de datos pueden optimizarse durante el postprocesamiento, incluido el procesamiento hacia delante y hacia atrás, mientras que en el procesamiento en tiempo real, cualquier interrupción o incompatibilidad en las correcciones y su transmisión dará lugar a un posicionamiento de menor precisión.
Una primera ventaja clave del postprocesamiento GNSS (PPK) frente al tiempo real (RTK) es que el sistema utilizado sobre el terreno no necesita disponer de un enlace de datos/radio para introducir las correcciones RTCM procedentes del CORS en el sistema INS/GNSS.
La principal limitación a la adopción del postprocesado es la exigencia de que la aplicación final actúe sobre el entorno. Por otro lado, si su aplicación puede soportar el tiempo de procesamiento adicional necesario para producir una trayectoria optimizada, mejorará enormemente la calidad de los datos de todos sus entregables.
