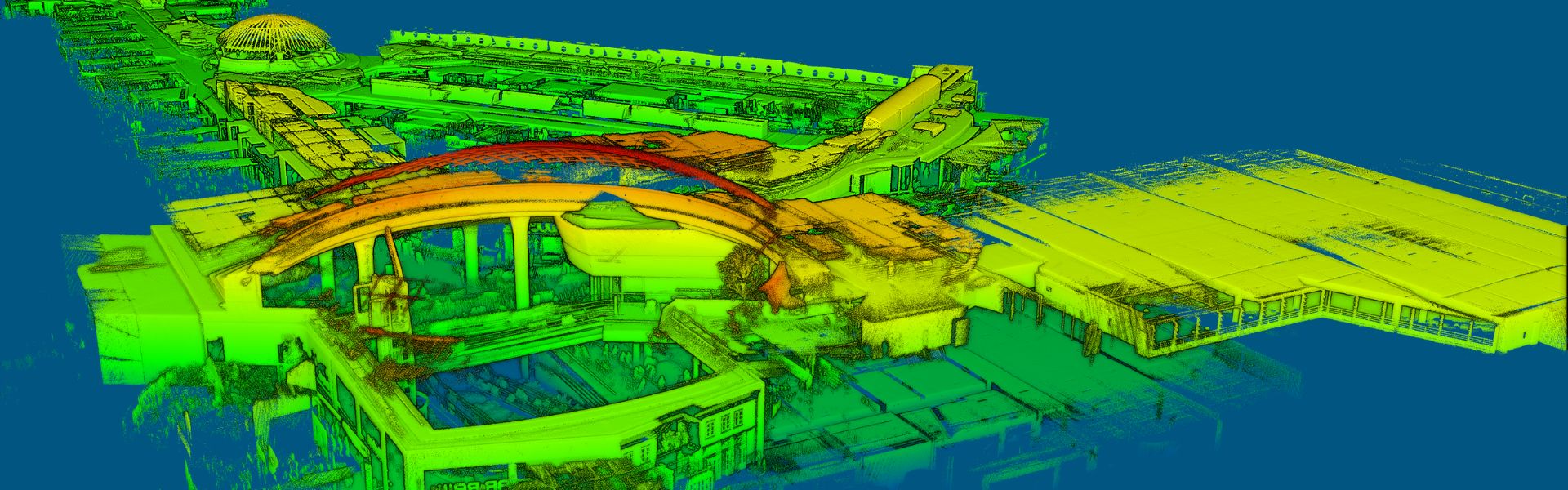
Cálculo SLAM
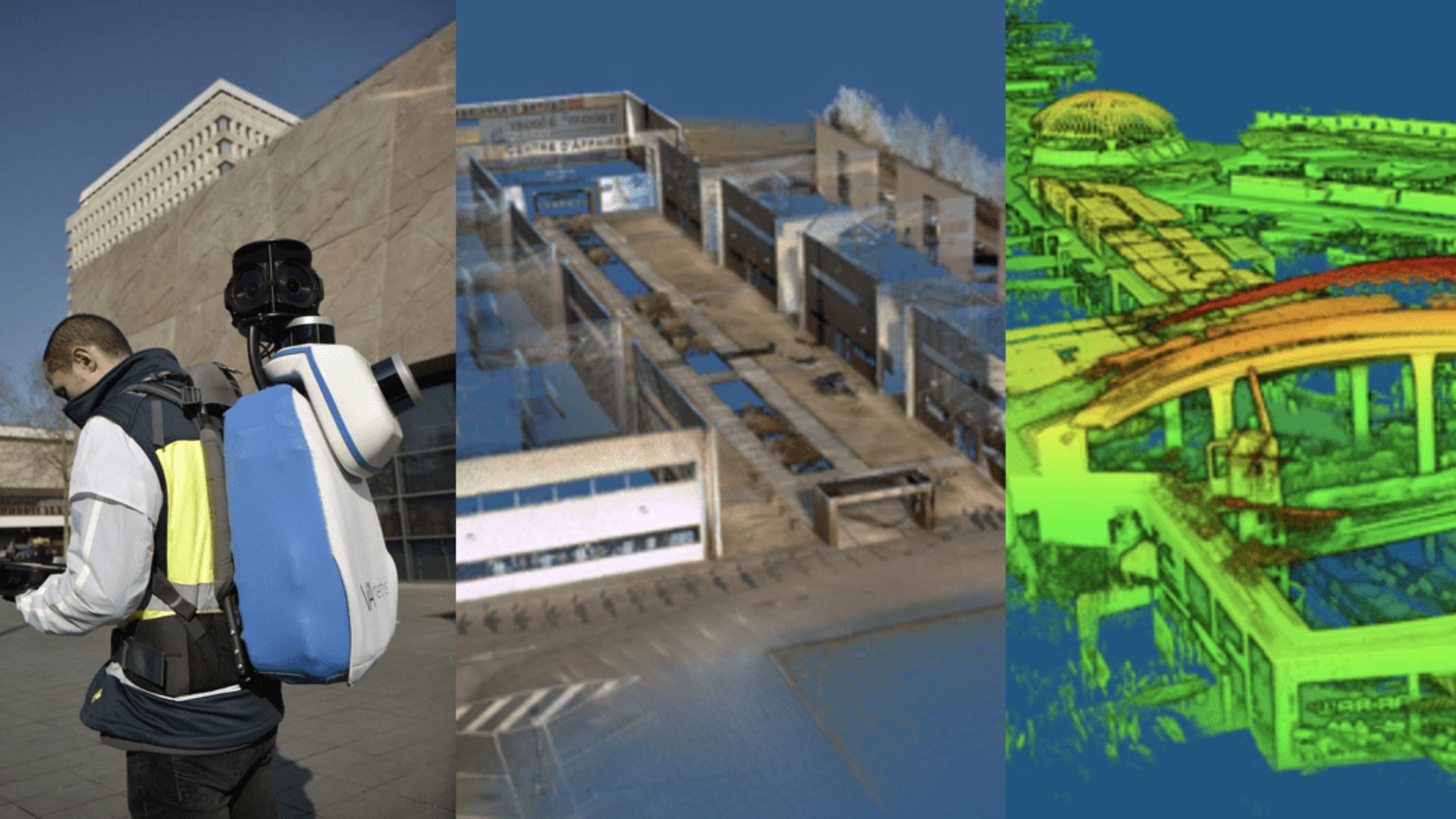
Cartografía interior con mochila
El Ellipse-D RTK INS ayuda al cálculo SLAM, sincroniza el LiDAR y la cámara.
"Hace años que trabajamos con SBG Systems y el Ellipse Series en particular. Siempre hemos confiado en estos robustos sensores inerciales". | Jérôme N., Fundador de VIAMETRIS
Sistema de escaneado móvil basado en mochila
El bMS3D-360 ha sido diseñado para los entornos más exigentes. Incorpora dos sensores LiDAR Velodyne, una cámara Lady-bug 360, la Ellipse-D el sistema de navegación inercial SBG con receptor GNSS L1/L2 interno, y un ordenador.
Un flujo de trabajo 7 veces más rápido
El flujo de trabajo es sencillo. El topógrafo pone en marcha el sistema, comprueba en una tableta que la información GNSS e inercial está calculada y comienza el levantamiento.
De vuelta a la oficina, el usuario inicia el software de postprocesamiento INS/GNSS para aumentar la precisión de la orientación y la posición, y luego utiliza el software VIAMETRIS para georreferenciar y colorear el punto cloud.
Los datos recopilados están listos para importarse en los programas de diseño más comunes. Este flujo de trabajo se acelera 7 veces en comparación con un método tradicional.
No faltan datos; el punto cloud puede utilizarse para mediciones posteriores, lo que supone un ahorro de tiempo y gastos de desplazamiento.
Además del rendimiento probado de bMS3D-360, algunos detalles marcan la diferencia en el mercado, como la cámara 360 situada en un poste retráctil para un mayor campo de visión cuando está desplegada, y una mayor seguridad cuando está recogida (algunos tejados pueden ser muy bajos, en aparcamientos por ejemplo).
Es la única mochila que ofrece una cámara de este tipo, lo que simplifica enormemente el trabajo de tratamiento. Al navegar en el punto cloud, el usuario abre una imagen única del entorno escaneado en 360° en lugar de mirar 4 puntos de vista de cámara diferentes.
Cuando el GNSS se enfrenta a fuentes de perturbación, el INS mantiene la trayectoria cuando la tecnología SLAM es limitada.
El RTK INS para ayudar al cálculo SLAM
El Ellipse-D es un sistema de navegación inercial muy compacto que integra un receptor GNSS L1/L2. Estecategoría INS industrial calcula el balanceo, el cabeceo, cabo así como la posición gracias al filtrado de Kalman extendido integrado.
En tiempo real, Ellipse-D los datos de orientación se utilizan para corregir la actitud del equipo y ayudar al SLAM calculado cabo.
De hecho, si el SLAM basado en cabo se proporciona a 20 Hz, el inercial basado en cabo se suministra a 200Hz. Entre dos informaciones SLAM, el INS mantiene robusto el cabo .
La misma historia para el uso del receptor GNSS que proporciona el posicionamiento absoluto al punto cloud así como la restricción de altitud. Cuando el GNSS se enfrenta a fuentes de perturbación, el INS mantiene la trayectoria allí donde la tecnología SLAM está limitada (un aparcamiento, por ejemplo, donde el LiDAR no tiene ningún objeto cercano que medir).
Jérôme Ninot, fundador de VIAMETRIS explica esta elección: " Hace años que trabajamos con SBG Systems y el Ellipse Series en particular. Siempre hemos confiado en estos robustos sensores inerciales, así que cuando llegó el momento de elegir un sistema INS/GNSS para nuestra mochila, nos alegramos de que el Ellipse-D ya integrara un receptor GNSS".
Siempre es una pérdida de tiempo no integrar un equipo adicional, insiste Jérôme.

Ellipse-D
Ellipse-D es un sistema de navegación inercial que integra un GNSS RTK de doble antena y doble frecuencia compatible con nuestro software de postprocesamiento Qinertia.
Diseñado para aplicaciones robóticas y geoespaciales, puede fusionar la entrada del cuentakilómetros con Pulse o CAN OBDII para mejorar la precisión del punto muerto.

Pida presupuesto para Ellipse-D
¿Tiene alguna pregunta?
Bienvenido a nuestra sección de preguntas frecuentes. Aquí encontrará respuestas a las preguntas más frecuentes sobre las aplicaciones que presentamos. Si no encuentra lo que busca, no dude en escribirnos directamente a contacto .
¿Qué es el GNSS frente al GPS?
GNSS son las siglas de Global Navigation Satellite System (Sistema Mundial de Navegación por Satélite) y GPS de Global Positioning System (Sistema de Posicionamiento Global). Estos términos suelen utilizarse indistintamente, pero se refieren a conceptos diferentes dentro de los sistemas de navegación por satélite.
GNSS es un término colectivo para todos los sistemas de navegación por satélite, mientras que GPS se refiere específicamente al sistema estadounidense. Incluye múltiples sistemas que proporcionan una cobertura mundial más completa, mientras que el GPS es sólo uno de ellos.
El GNSS mejora la precisión y la fiabilidad al integrar datos de varios sistemas, mientras que el GPS por sí solo puede tener limitaciones en función de la disponibilidad de los satélites y las condiciones ambientales.
GNSS representa la categoría más amplia de sistemas de navegación por satélite, incluidos el GPS y otros sistemas, mientras que el GPS es un GNSS específico desarrollado por Estados Unidos.
¿Cuál es la diferencia entre AHRS y INS?
La principal diferencia entre un Sistema de Referencia de Actitud y cabo (AHRS) y un Sistema de Navegación Inercial (INS) radica en su funcionalidad y en el alcance de los datos que proporcionan.
AHRS proporciona información sobre la orientación, en concreto, la actitud (cabeceo, balanceo) y cabo (guiñada) de un vehículo o dispositivo. Suele utilizar una combinación de sensores, como giroscopios, acelerómetros y magnetómetros, para calcular y estabilizar la orientación. AHRS proporciona la posición angular en tres ejes (cabeceo, balanceo y guiñada), lo que permite a un sistema comprender su orientación en el espacio. Se utiliza a menudo en aviación, vehículos aéreos no tripulados, robótica y sistemas marinos para proporcionar datos precisos de actitud y cabo , que son fundamentales para el control y la estabilización del vehículo.
INS no sólo proporciona datos de orientación (como AHRS), sino que también rastrea la posición, velocidad y aceleración de un vehículo a lo largo del tiempo. Utiliza sensores inerciales para estimar el movimiento en el espacio tridimensional sin depender de referencias externas como el GNSS. Combina los sensores que se encuentran en AHRS (giroscopios, acelerómetros), pero también puede incluir algoritmos más avanzados para el seguimiento de la posición y la velocidad, a menudo integrándose con datos externos como GNSS para una mayor precisión.
En resumen, AHRS se centra en la orientación (actitud y cabo), mientras que INS proporciona un conjunto completo de datos de navegación, incluyendo posición, velocidad y orientación.
¿Cuál es la diferencia entre IMU y INS?
La diferencia entre una unidad de medición inercial (IMU) y un sistema de navegación inercial (INS) radica en su funcionalidad y complejidad.
Una IMU (unidad de medición inercial) proporciona datos brutos sobre la aceleración lineal y la velocidad angular del vehículo, medidas por acelerómetros y giroscopios. Proporciona información sobre balanceo, cabeceo, guiñada y movimiento, pero no calcula la posición ni los datos de navegación. IMU está diseñado específicamente para transmitir datos esenciales sobre el movimiento y la orientación para su procesamiento externo con el fin de determinar la posición o la velocidad.
Por otro lado, un INS (sistema de navegación inercial) combina datos de IMU con algoritmos avanzados para calcular la posición, velocidad y orientación de un vehículo a lo largo del tiempo. Incorpora algoritmos de navegación como el filtrado de Kalman para la fusión e integración de sensores. Un INS proporciona datos de navegación en tiempo real, incluidas la posición, la velocidad y la orientación, sin depender de sistemas de posicionamiento externos como el GNSS.
Este sistema de navegación suele utilizarse en aplicaciones que requieren soluciones de navegación completas, sobre todo en entornos sin GNSS, como vehículos aéreos no tripulados militares, buques y submarinos.
¿Cómo puedo combinar sistemas inerciales con un LIDAR para cartografiar con drones?
La combinación de sistemas inerciales SBG Systems' con LiDAR para la cartografía con drones mejora la precisión y la fiabilidad en la captura de datos geoespaciales precisos.
A continuación se explica cómo funciona la integración y en qué beneficia a la cartografía basada en drones:
- Método de teledetección que utiliza impulsos láser para medir distancias a la superficie terrestre, creando un mapa 3D detallado del terreno o las estructuras.
- SBG Systems INS combina una unidad de medición inercial ( ) con datos GNSS para proporcionar posicionamiento, orientación (cabeceo, balanceo, guiñada) y velocidad precisos, incluso en entornos sin GNSS.IMU
El sistema inercial de SBG se sincroniza con los datos LiDAR. El INS rastrea con precisión la posición y orientación del dron, mientras que el LiDAR capta los detalles del terreno o de los objetos que hay debajo.
Conociendo la orientación exacta del dron, los datos LiDAR pueden situarse con precisión en el espacio 3D.
El componente GNSS proporciona posicionamiento global, mientras que IMU ofrece datos de orientación y movimiento en tiempo real. La combinación garantiza que, incluso cuando la señal GNSS es débil o no está disponible (por ejemplo, cerca de edificios altos o bosques densos), el INS puede seguir rastreando la trayectoria y la posición del dron, lo que permite una cartografía LiDAR coherente.
¿Qué es un sistema de posicionamiento en interiores?
Un sistema de posicionamiento en interiores (IPS) es una tecnología especializada que identifica con precisión la ubicación de objetos o personas en espacios cerrados, como edificios, donde las señales GNSS pueden ser débiles o inexistentes. Los IPS emplean diversas técnicas para proporcionar información de posicionamiento precisa en entornos como centros comerciales, aeropuertos, hospitales y almacenes.
IPS puede aprovechar varias tecnologías para determinar la ubicación, entre ellas:
- Wi-Fi: Utiliza la intensidad de la señal y la triangulación desde múltiples puntos de acceso para estimar la posición.
- Bluetooth de baja energía (BLE): Emplea balizas que envían señales a dispositivos cercanos para su seguimiento.
- Ultrasonidos: Utiliza ondas sonoras para la detección precisa de la ubicación, a menudo con sensores de dispositivos móviles.
- RFID (identificación por radiofrecuencia): Se trata de etiquetas que se colocan en los artículos para rastrearlos en tiempo real.
- Unidades de medición inercial (IMU): Estos sensores controlan el movimiento y la orientación, mejorando la precisión posicional cuando se combinan con otros métodos.
Un mapa digital detallado del espacio interior es esencial para un posicionamiento preciso, mientras que los dispositivos móviles o equipos especializados recogen las señales de la infraestructura de posicionamiento.
El IPS mejora la navegación, rastrea activos, ayuda a los servicios de emergencia, analiza el comportamiento de los minoristas y se integra en los sistemas de edificios inteligentes, mejorando significativamente la eficiencia operativa allí donde falla el GNSS tradicional.
