Análisis de vuelo de UAV con sensor inercial en miniatura
Análisis de vuelo de UAV para la medición precisa del viento.
"Se eligióEllipse-N porque cumple todos los requisitos y ofrece un equilibrio único entre precisión, tamaño y peso". | Dr.-Ing. Uwe Putze, Eberhard Karls Universität

Vehículo aéreo no tripulado portador de sensores polivalente
MASC es un pequeño UAV desarrollado para la investigación de la capa límite atmosférica. Se ha elegido la Ellipse-N para registrar la posición del UAV, la velocidad de avance y los ángulos de actitud.
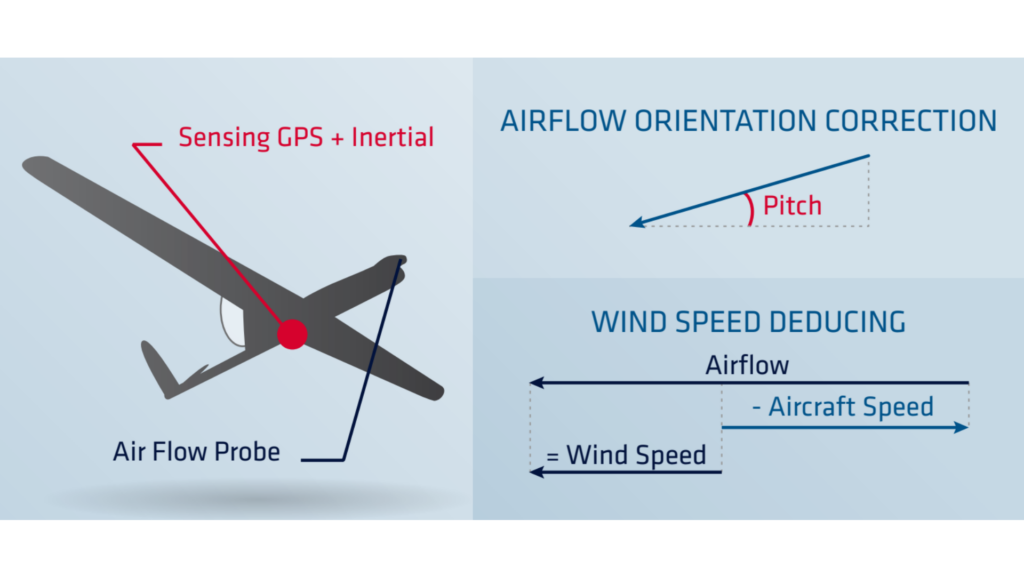
La velocidad y dirección del viento pueden calcularse con precisión teniendo en cuenta el flujo de aire.
El cálculo del viento en vuelo puede resultar complicado porque la velocidad del aire y los ángulos de incidencia, medidos por la sonda de flujo de aire incorporada, deben compensarse con el comportamiento real del UAV.
El Multi-Purpose Airborne Sensor Carrier (MASC) es un pequeño vehículo aéreo no tripulado (UAV) desarrollado para la investigación de la capa límite atmosférica. Está diseñado y operado por el grupo de Física Medioambiental de la Universidad Eberhard Karls de Tubinga, Alemania.
La carga útil típica de este UAV es un sistema de medición meteorológica, diseñado para calcular flujos turbulentos.
En comparación con los sistemas terrestres o las aeronaves, el MASC UAV es una herramienta rentable y valiosa para investigaciones como la evaluación de emplazamientos de plantas de energía eólica en terrenos complejos.
"Cálculo de la velocidad del viento "en vuelo
El cálculo del viento en vuelo puede resultar complicado porque la velocidad del aire y los ángulos de incidencia, medidos por la sonda de flujo de aire integrada, deben compensarse con el comportamiento real del UAV.
Restando la velocidad y la actitud del UAV respecto al suelo del vector de flujo de aire, puede calcularse la velocidad y la dirección del viento. Así pues, una unidad de medición inercial precisa es crucial para realizar el análisis del vuelo del UAV.
Ellipse-N: el mini INS asistido por GPS
Turbulence plays an important role in the transport and exchange of energy in the lower atmosphere.
A high data rate is required to record these very fast fluctuations in the wind speed. “We were looking for a precise inertial measurement unit. Required specifications were an accuracy in attitude angles of <1°, and a high data output rate” declares Uwe Putze, Dr.-Ing. at the Eberhard Karls Universität Tübingen.
As the unit had to be mounted in a small unmanned aerial vehicle, small size and low weight were also important for the project. “The Ellipse-N was selected because it fulfills all the requirements and provides a unique balance of accuracy, size and weight”, adds the Project Engineer.
De pequeño tamaño y ligero, el Ellipse-N ofrece algo más que la medición de la actitud y el cabo . Fusiona los datos inerciales con la información del GPS y del sensor de presión para proporcionar una posición robusta y una precisión de altitud mejorada.
El informe que mostraba la calibración dinámica del sensor en todo el rango de temperaturas hizo que el equipo confiara aún más en que el sistema cumpliría las especificaciones anunciadas.
Datos de alta calidad Ellipse-N
La Ellipse-N se ha integrado fácilmente en el ordenador de medición de a bordo a través de una interfaz serie.
Mientras que la sonda de flujo de aire mide la velocidad del aire y los ángulos de incidencia, la Ellipse-N registra la posición del UAV, la velocidad sobre el terreno y los ángulos de actitud.
Los datos brutos se almacenan en el ordenador, y también pueden visualizarse en tiempo real en la estación terrestre, gracias a un enlace de telemetría.
Utilizando este sensor, el sistema puede medir la velocidad del viento con una precisión de +/- 0,5 metros por segundo en los tres ejes, y registrar la variación de la velocidad hasta 20Hz. La velocidad de salida de 200 Hz hace innecesaria la interpolación de datos.


Ellipse-N
Ellipse-N es un sistema de navegación inercial RTKINS compacto y de alto rendimiento con un receptor GNSS integrado de doble banda y cuatro constelaciones. Proporciona balanceo, cabeceo, cabo y oscilación, así como una posición GNSS centimétrica.
Ellipse-N sensor Ellipse-N es el más adecuado para entornos dinámicos y condiciones GNSS adversas, pero también puede funcionar en aplicaciones menos dinámicas con un cabo magnético.

Pida presupuesto para Ellipse-N
¿Tiene alguna pregunta?
Bienvenido a nuestra sección de preguntas frecuentes. Aquí encontrará respuestas a las preguntas más frecuentes sobre las aplicaciones que presentamos. Si no encuentra lo que busca, no dude en escribirnos directamente a contacto .
¿Utilizan GPS los UAV?
Los vehículos aéreos no tripulados (UAV), comúnmente conocidos como drones, suelen utilizar la tecnología del Sistema de Posicionamiento Global (GPS) para la navegación y el posicionamiento.
El GPS es un componente esencial del sistema de navegación de un UAV, ya que proporciona datos de localización en tiempo real que permiten al dron determinar su posición con precisión y ejecutar diversas tareas.
En los últimos años, este término ha sido sustituido por el de GNSS (Sistema Mundial de Navegación por Satélite). GNSS se refiere a la categoría general de sistemas de navegación por satélite, que engloba el GPS y otros sistemas diversos. En cambio, el GPS es un tipo específico de GNSS desarrollado por Estados Unidos.
¿Cómo controlar los retrasos de salida en las operaciones de los UAV?
Controlar los retardos de salida en las operaciones de los UAV es esencial para garantizar un rendimiento sensible, una navegación precisa y una comunicación eficaz, especialmente en aplicaciones de defensa o de misión crítica.
La latencia de salida es un aspecto importante en las aplicaciones de control en tiempo real, donde una mayor latencia de salida podría degradar el rendimiento de los lazos de control. Nuestro software integrado INS ha sido diseñado para minimizar la latencia de salida: una vez muestreados los datos del sensor, el filtro de Kalman extendido (EKF) realiza pequeños cálculos en tiempo constante antes de generar las salidas. Normalmente, el retardo de salida observado es inferior a un milisegundo.
La latencia de procesamiento debe sumarse a la latencia de transmisión de datos si se desea obtener el retardo total. Esta latencia de transmisión varía de una interfaz a otra. Por ejemplo, un mensaje de 50 bytes enviado por una interfaz UART a 115200 bps tardará 4ms en transmitirse completamente. Considere tasas de baudios más altas para minimizar la latencia de salida.
¿Qué es la geovigilancia UAV?
La geovalla para vehículos aéreos no tripulados (UAV) es una barrera virtual que define límites geográficos específicos dentro de los cuales puede operar un vehículo aéreo no tripulado (UAV).
Esta tecnología desempeña un papel fundamental en la mejora de la seguridad, la protección y el cumplimiento de la normativa en las operaciones con drones, sobre todo en zonas donde las actividades de vuelo pueden suponer riesgos para las personas, los bienes o el espacio aéreo restringido.
En sectores como los servicios de reparto, la construcción y la agricultura, la geovalla ayuda a garantizar que los drones operen dentro de zonas seguras y legales, evitando posibles conflictos y mejorando la eficiencia operativa.
Las fuerzas del orden y los servicios de emergencia pueden utilizar la geocercas para gestionar las operaciones de los UAV durante actos públicos o emergencias, asegurándose de que los drones no entren en zonas sensibles.
Las geocercas pueden emplearse para proteger la fauna y los recursos naturales restringiendo el acceso de drones a determinados hábitats o zonas de conservación.
¿Qué es una carga útil?
Una carga útil se refiere a cualquier equipo, dispositivo o material que un vehículo (dron, embarcación...) transporta para realizar su propósito previsto más allá de las funciones básicas. La carga útil es independiente de los componentes necesarios para el funcionamiento del vehículo, como sus motores, batería y bastidor.
Ejemplos de cargas útiles:
- Cámaras: cámaras de alta resolución, cámaras termográficas...
- Sensores: LiDAR, sensores hiperespectrales, sensores químicos...
- Equipos de comunicación: radios, repetidores de señal...
- Instrumentos científicos: sensores meteorológicos, muestreadores de aire...
- Otros equipos especializados
