Ellipse-D Antrieb für einen selbstfahrenden Lkw
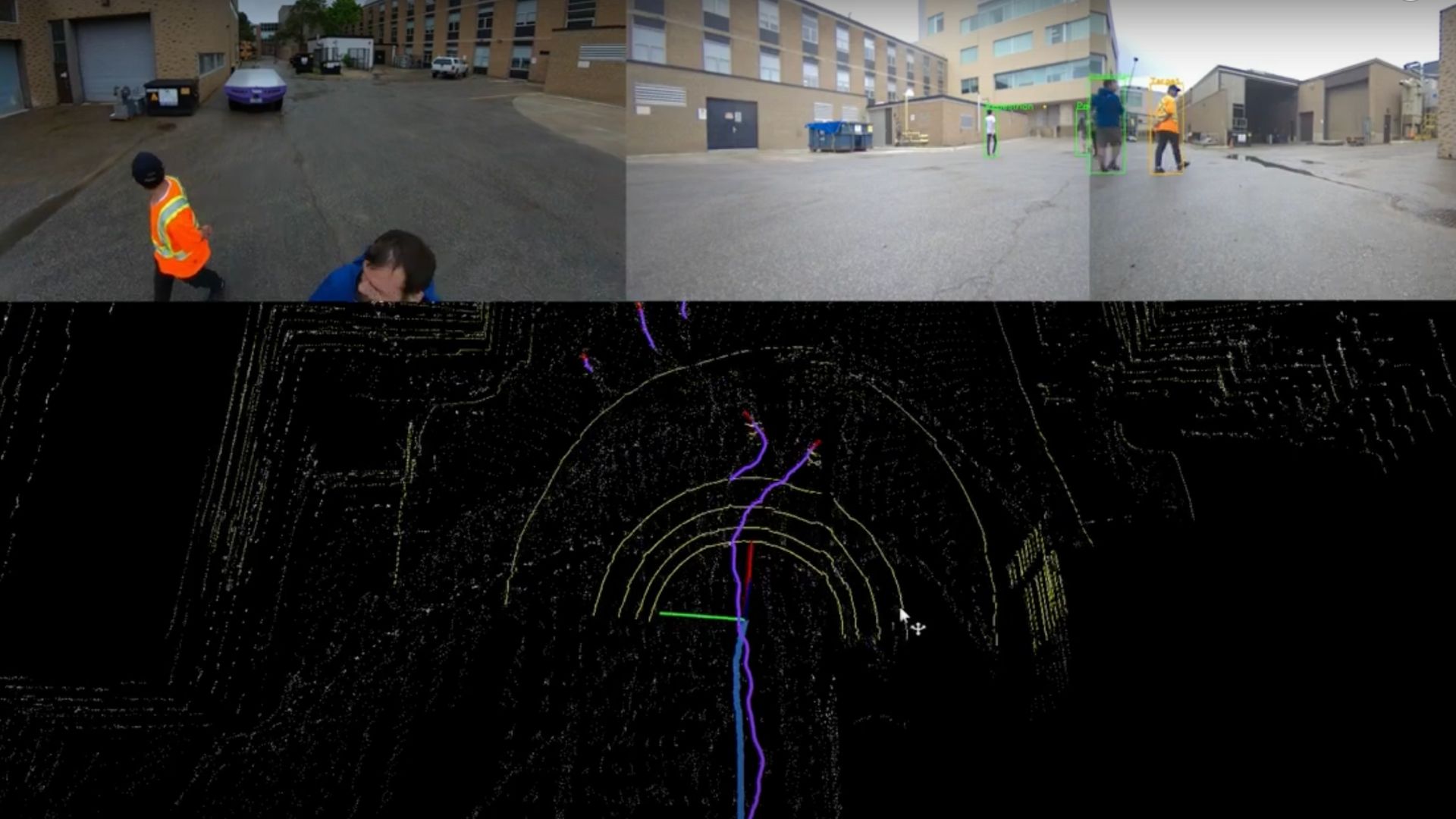
Selbstfahrender LKW mit unabhängigem Radantrieb und Lenksystem.
"Das Ellipse-D von SBG Systems war einfach zu bedienen, sehr genau und stabil, mit einem kleinen Formfaktor - all das war für unsere WATonoTruck-Entwicklung wichtig." | Amir K., Professor und Direktor, Universität Waterloo

Wir alle wissen, dass Unfälle im Straßenverkehr durch Fahrfehler, ungünstige Witterungsbedingungen oder Fehlfunktionen der Fahrzeuge verursacht werden. Aber was wäre, wenn wir Fahrzeuge dazu bringen könnten, selbstständig zu fahren und diese Unfälle zu vermeiden? Zum Beispiel einen selbstfahrenden Lkw oder ein autonomes Auto.
Das ist die Idee hinter selbstfahrenden Fahrzeugen, und das Labor für mechatronische Fahrzeugsysteme (MVS) der University of Waterloo arbeitet an einem Projekt namens WATonoTruck (WATerloo atonomous Truck).
Es handelt sich um einen selbstfahrenden Pritschenwagen, der für den schweren Materialumschlag, die Landwirtschaft und Serviceanwendungen konzipiert ist. Mit Hilfe fortschrittlicher Steuerungsmethoden werden die Bewegungen des Lkw analysiert, insbesondere unter gefährlichen Bedingungen oder bei Störungen, um Sicherheit und Effizienz zu gewährleisten.
Das Labor möchte die Anwendung autonomer Fahrzeugtechnologie über den Personentransport hinaus erweitern. Sie soll auch in anderen Branchen wie der Landwirtschaft, dem Bergbau und der Schifffahrt eingesetzt werden, um die Effizienz zu steigern und Betriebsausfälle zu verringern.
Treffen Sie WATonoTruck
Ein LKW, der keinen Fahrer braucht - das ist WATonoTruck! Er ist ein selbstfahrender Pritschenwagen mit unabhängigem Radantrieb und Lenksystem. Er basiert auf der Corner Module (CM)-Plattform.
Die CMs wurden im Hinblick auf ein modulares Fahrzeugdesign entwickelt und können auf jedem Fahrgestell in jeder beliebigen Konfiguration installiert werden.
Jedes CM funktioniert wie ein einrädriges Elektrofahrzeug, das mit einer eigenen Steuereinheit ausgestattet ist. Es ermöglicht einen unabhängigen Betrieb mit Antrieb, Bremse, Lenkung und Aufhängung.
Das macht den Stapler besonders intelligent und anpassungsfähig an jede Anwendung und jedes Gelände.
WATonoTruck ermächtigt durch Ellipse-D
Als führender Anbieter von hochpräzisen Positionierungs- und Navigationslösungen sind wir stolz darauf, mit dem Mechatronic Vehicle Systems Lab der University of Waterloo zusammenzuarbeiten.
Wir bieten Ellipse-D , ein RTK-System mit zwei Antennen INS, das eine unübertroffene Genauigkeit bei Position und richtung bietet.
Diese Präzision ist für die autonome Navigation von entscheidender Bedeutung und gewährleistet die sichere und genaue Bewegung von WATonoTruck auch in schwierigen Umgebungen.
Ellipse-D (3. Generation), LiDAR-Sensoren und fortschrittliche Kameras - dieses umfassende Sensorpaket ermöglicht Umgebungskartierung, Hinderniserkennung und Pfadplanung in Echtzeit.
Durch unser Sponsoring erhält das Labor bei der Entwicklung von WATonoTruck wichtige Unterstützung in Form von hochpräziser Bewegungs- und Navigationstechnik, auf die es sich verlassen kann.
Diese Zusammenarbeit trägt nicht nur zur erfolgreichen Entwicklung von WATonoTruck bei, sondern fördert auch das Wachstum von Anwendungen für autonome Fahrzeuge in allen Branchen und damit Innovation und Sicherheit im Transportwesen und darüber hinaus.

Ellipse-D
Das Ellipse-D ist ein Trägheitsnavigationssystem mit zwei Antennen und RTK-GNSS mit zwei Frequenzen, das mit unserer Post-Processing-Software Qinertia kompatibel ist.
Es wurde für Robotik- und Geodatenanwendungen entwickelt und kann den Kilometerzähler-Eingang mit Pulse oder CAN OBDII für eine verbesserte Genauigkeit der Koppelnavigation verbinden.

Fordern Sie ein Angebot an für Ellipse-D
Haben Sie noch Fragen?
Willkommen in unserem FAQ-Bereich! Hier finden Sie Antworten auf die häufigsten Fragen zu den von uns vorgestellten Anwendungen. Wenn Sie nicht finden, wonach Sie suchen, können Sie uns gerne direkt kontaktieren!
Was ist der Unterschied zwischen RTK und PPK?
Real-Time Kinematic (RTK) ist eine Positionierungstechnik, bei der GNSS-Korrekturen nahezu in Echtzeit übertragen werden, in der Regel mit einem Korrekturstrom im RTCM-Format. Bei der Gewährleistung der GNSS-Korrekturen, insbesondere ihrer Vollständigkeit, Verfügbarkeit, Abdeckung und Kompatibilität, können sich jedoch Herausforderungen ergeben.
Der Hauptvorteil von PPK gegenüber der RTK-Nachverarbeitung besteht darin, dass die Datenverarbeitungsaktivitäten während der Nachverarbeitung optimiert werden können, einschließlich der Vorwärts- und Rückwärtsverarbeitung, während bei der Echtzeitverarbeitung jede Unterbrechung oder Inkompatibilität bei den Korrekturen und ihrer Übertragung zu einer geringeren Genauigkeit der Positionierung führt.
Ein erster wesentlicher Vorteil von GNSS-Post-Processing (PPK) gegenüber Echtzeit (RTK) besteht darin, dass das im Feld eingesetzte System nicht über eine Datenverbindung/Funk verfügen muss, um die vom CORS kommenden RTCM-Korrekturen in das INS/GNSS-System einzuspeisen.
Die wichtigste Einschränkung bei der Einführung der Nachbearbeitung ist die Anforderung an die endgültige Anwendung, auf die Umgebung einzuwirken. Wenn Ihre Anwendung jedoch die zusätzliche Verarbeitungszeit verkraften kann, die für die Erstellung einer optimierten Flugbahn erforderlich ist, wird dies die Datenqualität für alle Ihre Ergebnisse erheblich verbessern.
Was ist präzise Punktpositionierung?
Precise Point Positioning (PPP) ist ein Satellitennavigationsverfahren, das durch Korrektur von Satellitensignalfehlern eine hochpräzise Positionsbestimmung ermöglicht. Im Gegensatz zu herkömmlichen GNSS-Methoden, die sich häufig auf bodengestützte Referenzstationen stützen (wie bei RTK), nutzt PPP globale Satellitendaten und fortschrittliche Algorithmen, um genaue Standortinformationen zu liefern.
PPP funktioniert überall auf der Welt, ohne dass lokale Referenzstationen erforderlich sind. Dadurch eignet es sich für Anwendungen in abgelegenen oder schwierigen Umgebungen, in denen es keine Bodeninfrastruktur gibt. Durch die Verwendung präziser Satellitenbahn- und Uhrendaten sowie Korrekturen für atmosphärische und Mehrwegeffekte minimiert PPP gängige GNSS-Fehler und kann eine Genauigkeit im Zentimeterbereich erreichen.
PPP kann für die nachträgliche Positionsbestimmung verwendet werden, bei der die gesammelten Daten im Nachhinein analysiert werden, aber auch für die Echtzeit-Positionierung ist es geeignet. PPP in Echtzeit (RTPPP) ist in zunehmendem Maße verfügbar und ermöglicht es den Nutzern, Korrekturen zu erhalten und ihre Position in Echtzeit zu bestimmen.
