UAV-Fluganalyse mit Miniatur-Trägheitssensor
UAV-Fluganalyse zur präzisen Windmessung.
"Ellipse-N wurde ausgewählt, weil es alle Anforderungen erfüllt und eine einzigartige Balance zwischen Genauigkeit, Größe und Gewicht bietet." | Dr.-Ing. Uwe Putze, Eberhard Karls Universität

Mehrzweck-Sensorträger-Drohne aus der Luft
MASC ist ein kleines UAV, das für die Erforschung der atmosphärischen Grenzschicht entwickelt wurde. Die Ellipse-N wurde zur Aufzeichnung der UAV-Position, der Geschwindigkeit über Grund und der lage gewählt.
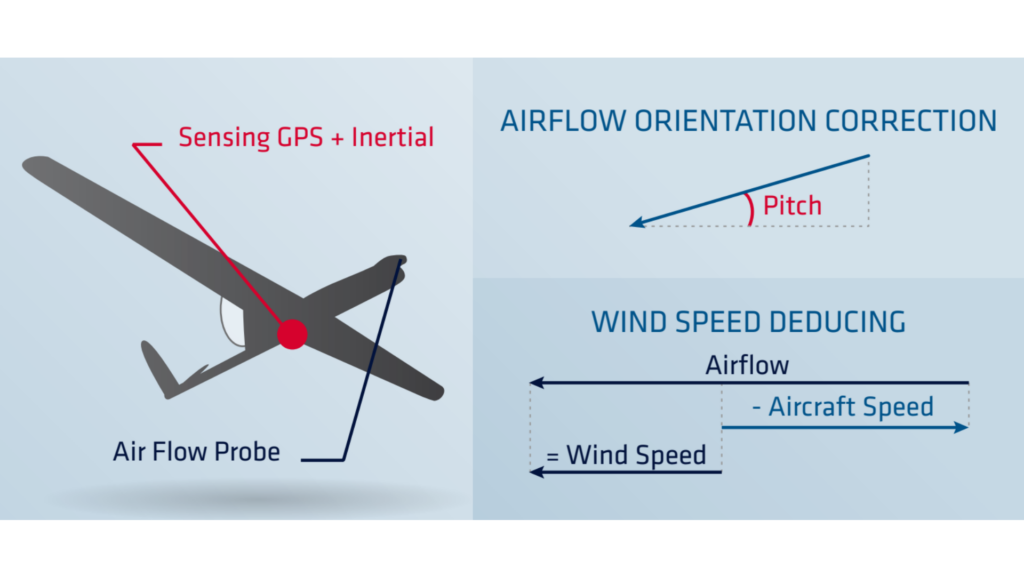
Windgeschwindigkeit und -richtung können unter Berücksichtigung der Luftströmung genau berechnet werden.
Die Windberechnung während des Fluges kann schwierig sein, da die von der eingebetteten Luftströmungssonde gemessene Fluggeschwindigkeit und die Einfallswinkel durch das tatsächliche Verhalten des UAV kompensiert werden müssen.
Der Multi-Purpose Airborne Sensor Carrier (MASC) ist ein kleines unbemanntes Luftfahrzeug (UAV), das für die Erforschung der atmosphärischen Grenzschicht entwickelt wurde. Es wird von der Arbeitsgruppe Umweltphysik an der Eberhard Karls Universität Tübingen entwickelt und betrieben.
Die typische Nutzlast für dieses UAV ist ein meteorologisches Messsystem zur Berechnung turbulenter Strömungen.
Im Vergleich zu terrestrischen Systemen oder Flugzeugen ist das MASC UAV ein kostengünstiges und wertvolles Werkzeug für Forschungsarbeiten wie die Standortbewertung von Windenergieanlagen in komplexem Gelände.
"In-Flight" Windgeschwindigkeitsberechnung
Die Berechnung des Windes während des Fluges kann sich als schwierig erweisen, da die Fluggeschwindigkeit und der Anströmwinkel, die von der eingebauten Luftströmungssonde gemessen werden, durch das tatsächliche Verhalten der Drohne kompensiert werden müssen.
Durch Subtraktion der Bodengeschwindigkeit der Drohne und lage vom Luftströmungsvektor können Windgeschwindigkeit und -richtung berechnet werden. Daher ist eine präzise Trägheitsmesseinheit für die Durchführung der UAV-Fluganalyse von entscheidender Bedeutung.
Ellipse-N: das GPS-gestützte INS
Turbulence plays an important role in the transport and exchange of energy in the lower atmosphere.
A high data rate is required to record these very fast fluctuations in the wind speed. “We were looking for a precise inertial measurement unit. Required specifications were an accuracy in attitude angles of <1°, and a high data output rate” declares Uwe Putze, Dr.-Ing. at the Eberhard Karls Universität Tübingen.
As the unit had to be mounted in a small unmanned aerial vehicle, small size and low weight were also important for the project. “The Ellipse-N was selected because it fulfills all the requirements and provides a unique balance of accuracy, size and weight”, adds the Project Engineer.
Die Ellipse-N ist klein und leicht und bietet mehr als nur die Messung von lage und richtung . Es verbindet Trägheitsdaten mit GPS- und Drucksensorinformationen, um eine robuste Position und eine verbesserte Höhengenauigkeit zu liefern.
Der Bericht, der die dynamische Kalibrierung des Sensors über den gesamten Temperaturbereich zeigt, machte das Team noch zuversichtlicher, dass das System die angekündigten Spezifikationen erfüllen würde.
Ellipse-N Daten hoher Qualität
Die Ellipse-N wurde über eine serielle Schnittstelle einfach in den Bordmesscomputer integriert.
Während die Luftstromsonde die Luftgeschwindigkeit und den Anströmwinkel misst, zeichnet die Ellipse-N die UAV-Position, die Bodengeschwindigkeit und den lage auf.
Die Rohdaten werden im Computer gespeichert und können dank einer Telemetrieverbindung auch in Echtzeit in der Bodenstation angezeigt werden.
Mit diesem Sensor kann das System die Windgeschwindigkeit mit einer Genauigkeit von +/- 0,5 Metern pro Sekunde in allen drei Achsen messen und Geschwindigkeitsschwankungen mit bis zu 20 Hz aufzeichnen. Die Ausgaberate von 200 Hz macht jegliche Dateninterpolation überflüssig.


Ellipse-N
Ellipse-N ist ein kompaktes und leistungsfähiges RTK-Inertial-NavigationssystemINS) mit integriertem Dualband-, Quad-Konstellations-GNSS-Empfänger. Es liefert rollen, nicken, richtung und Heben sowie eine zentimetrische GNSS-Position.
Ellipse-N eignet sich am besten für dynamische Umgebungen und raue GNSS-Bedingungen, kann aber auch in weniger dynamischen Anwendungen mit magnetischer richtung eingesetzt werden.

Angebot für Ellipse-N anfordern
Haben Sie noch Fragen?
Willkommen in unserem FAQ-Bereich! Hier finden Sie Antworten auf die häufigsten Fragen zu den von uns vorgestellten Anwendungen. Wenn Sie nicht finden, wonach Sie suchen, können Sie uns gerne direkt kontaktieren!
Verwenden UAVs GPS?
Unbemannte Luftfahrzeuge (Unmanned Aerial Vehicles, UAVs), gemeinhin als Drohnen bekannt, nutzen in der Regel die GPS-Technologie (Global Positioning System) zur Navigation und Positionsbestimmung.
GPS ist ein wesentlicher Bestandteil des Navigationssystems einer Drohne. Es liefert Standortdaten in Echtzeit, mit denen die Drohne ihre Position genau bestimmen und verschiedene Aufgaben ausführen kann.
In den letzten Jahren ist dieser Begriff durch den neuen Begriff GNSS (Global Navigation Satellite System) ersetzt worden. GNSS bezieht sich auf die allgemeine Kategorie der Satellitennavigationssysteme, die GPS und verschiedene andere Systeme umfasst. Im Gegensatz dazu ist GPS eine spezielle Art von GNSS, die von den Vereinigten Staaten entwickelt wurde.
Wie lassen sich Ausgangsverzögerungen im UAV-Betrieb kontrollieren?
Die Kontrolle von Ausgangsverzögerungen im UAV-Betrieb ist für die Sicherstellung einer reaktionsschnellen Leistung, einer präzisen Navigation und einer effektiven Kommunikation von entscheidender Bedeutung, insbesondere in der Verteidigung oder bei missionskritischen Anwendungen.
Die Ausgabelatenz ist ein wichtiger Aspekt bei Echtzeit-Steuerungsanwendungen, bei denen eine höhere Ausgabelatenz die Leistung des Regelkreises beeinträchtigen könnte. Unsere eingebettete Software INS wurde entwickelt, um die Ausgabelatenz zu minimieren: Sobald die Sensordaten abgetastet sind, führt der Erweiterte Kalman-Filter (EKF) kleine und zeitlich konstante Berechnungen durch, bevor die Ausgaben generiert werden. In der Regel beträgt die beobachtete Ausgabeverzögerung weniger als eine Millisekunde.
Die Verarbeitungslatenz sollte zur Datenübertragungslatenz addiert werden, wenn man die Gesamtverzögerung ermitteln will. Diese Übertragungslatenz variiert von einer Schnittstelle zur anderen. Eine 50-Byte-Nachricht, die über eine UART-Schnittstelle mit 115200 bps gesendet wird, benötigt beispielsweise 4 ms für die vollständige Übertragung. Ziehen Sie höhere Baudraten in Betracht, um die Ausgabelatenz zu minimieren.
Was ist UAV-Geofencing?
UAV-Geofencing ist eine virtuelle Barriere, die bestimmte geografische Grenzen definiert, innerhalb derer ein unbemanntes Luftfahrzeug (UAV) operieren kann.
Diese Technologie spielt eine entscheidende Rolle bei der Verbesserung der Sicherheit und der Einhaltung von Vorschriften für den Drohnenbetrieb, insbesondere in Bereichen, in denen Flugaktivitäten ein Risiko für Menschen, Eigentum oder den beschränkten Luftraum darstellen können.
In Branchen wie Lieferdiensten, im Baugewerbe und in der Landwirtschaft trägt Geofencing dazu bei, dass Drohnen innerhalb sicherer und legaler Bereiche operieren, um potenzielle Konflikte zu vermeiden und die betriebliche Effizienz zu steigern.
Strafverfolgungs- und Rettungsdienste können Geofencing einsetzen, um den Einsatz von Drohnen bei öffentlichen Veranstaltungen oder in Notfällen zu steuern und sicherzustellen, dass Drohnen nicht in sensible Bereiche eindringen.
Geofencing kann zum Schutz von Wildtieren und natürlichen Ressourcen eingesetzt werden, indem der Zugang von Drohnen zu bestimmten Lebensräumen oder Naturschutzgebieten eingeschränkt wird.
Was ist eine Nutzlast?
Als Nutzlast wird jede Ausrüstung, jedes Gerät oder Material bezeichnet, das ein Fahrzeug (Drohne, Schiff ...) mit sich führt, um seinen Zweck über die Grundfunktionen hinaus zu erfüllen. Die Nutzlast ist von den für den Betrieb des Fahrzeugs erforderlichen Komponenten wie Motoren, Batterie und Rahmen getrennt.
Beispiele für Nutzlasten:
- Kameras: Hochauflösende Kameras, Wärmebildkameras...
- Sensoren: LiDAR, hyperspektrale Sensoren, chemische Sensoren...
- Kommunikationsausrüstung: Funkgeräte, Signalverstärker...
- Wissenschaftliche Instrumente: Wettersensoren, Luftprobennehmer...
- Andere spezielle Ausrüstung
