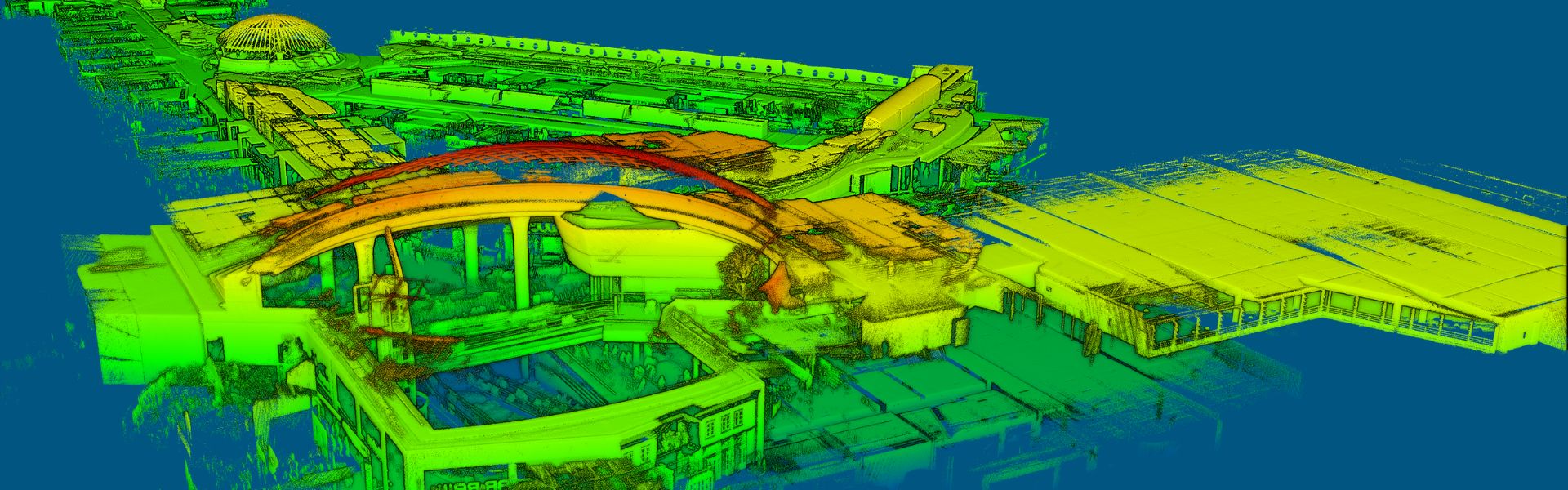
Indoor Mapping with Back-pack
The Ellipse-D RTK INS helps SLAM computation, synchronizes LiDAR and Camera.
“It has been years now that we work with SBG Systems and the Ellipse Series in particular. We have always relied on these robust inertial sensors.” | Jérôme N., Founder of VIAMETRIS
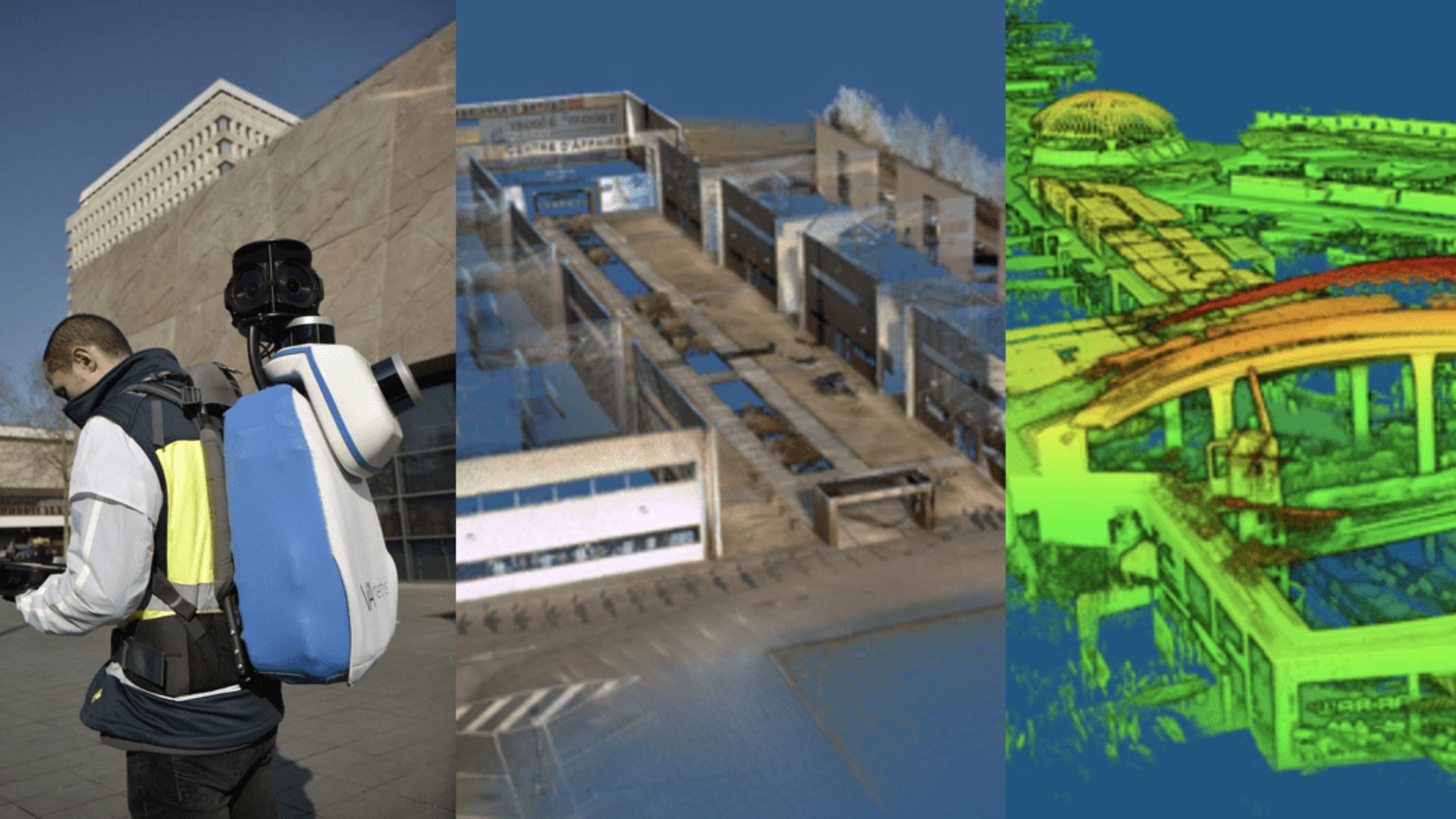
Backpack-based Mobile Scanning System
The bMS3D-360 has been designed for the most challenging environments. It embeds two Velodyne LiDAR sensors, a 360 Lady-bug camera, the Ellipse-D the SBG inertial navigation system with internal L1/L2 GNSS receiver, and a computer.
A Workflow Quickened by 7 times
The workflow is simple. The surveyor starts the system, checks on a tablet that the GNSS and inertial information are computed, and starts the survey.
Back at the office, the user launches the INS/GNSS post-processing software to increase orientation and position accuracy, and then uses the VIAMETRIS software to georeference and colorize the point cloud.
Collected data are ready to be imported into the most common design software. This workflow is quickened by 7 times in comparison with a traditional method.
There is no data missing; the point cloud can be used for further measurements, meaning an economy of time and travel expenses.
Additionally to the bMS3D-360 proven performance, some details make the difference on the market, such as the 360 camera located on a retractable pole for a larger field of view when deployed, and a higher security when retracted (some roofs can be very low, in parking lots for example).
It is the only backpack to offer such a camera which greatly simplifies the treatment work. When navigating in the point cloud, the user opens a unique picture of the 360° scanned environment instead of looking at 4 different camera points of view.
When the GNSS faces sources of disturbance, the INS maintains the trajectory were the SLAM technology is limited.
The RTK INS to Aid the SLAM Computation
The Ellipse-D is a very compact inertial navigation system integrating an L1/L2 GNSS receiver. This industrial-grade INS computes roll, pitch, heading as well as position thanks to the embedded Extended Kalman Filtering.
In real-time, Ellipse-D orientation data are used to correct the equipment attitude and help the SLAM computed heading.
Indeed, if the SLAM-based heading is provided at 20 Hz, the inertial-based heading is delivered at 200Hz. Between two SLAM information, the INS keeps the heading robust.
Same story for the use of the GNSS receiver which provides absolute positioning to the point cloud as well as altitude constraint. When the GNSS faces sources of disturbance, the INS maintains the trajectory were the SLAM technology is limited (a parking lot for example, where the LiDAR has no close object to measure).
Jérôme Ninot, Founder of VIAMETRIS explains this choice: “It has been years now that we work with SBG Systems and the Ellipse Series in particular. We have always relied on these robust inertial sensors, so when it came to choose an INS/GNSS system for our back-pack, we were glad that the Ellipse-D was already integrating a GNSS receiver.”
It is always a gain of time not to integrate an additional equipment, to insist Jérôme.

Ellipse-D
The Ellipse-D is an inertial navigation system integrating a dual antenna and dual frequency RTK GNSS that is compatible with our Post-Processing software Qinertia.
Designed for robotic and geospatial applications, it can fuse Odometer input with Pulse or CAN OBDII for enhanced dead-reckoning accuracy.

Ask a quotation for Ellipse-D
Do you have questions?
Welcome to our FAQ section! Here, you’ll find answers to the most common questions about the applications we showcase. If you don’t find what you’re looking for, feel free to contact us directly!
What is GNSS vs GPS?
GNSS stands for Global Navigation Satellite System and GPS for Global Positioning System. These terms are often used interchangeably, but they refer to different concepts within satellite-based navigation systems.
GNSS is a collective term for all satellite navigation systems, while GPS refers specifically to the U.S. system. It includes multiple systems that provide more comprehensive global coverage, while GPS is just one of those systems.
You get improved accuracy and reliability with GNSS, by integrating data from multiple systems, whereas GPS alone might have limitations depending on satellite availability and environmental conditions.
What is the difference between AHRS and INS?
The main difference between an Attitude and Heading Reference System (AHRS) and an Inertial Navigation System (INS) lies in their functionality and the scope of the data they provide.
AHRS provides orientation information—specifically, the attitude (pitch, roll) and heading (yaw) of a vehicle or device. It typically uses a combination of sensors, including gyroscopes, accelerometers, and magnetometers, to calculate and stabilize the orientation. The AHRS outputs the angular position in three axes (pitch, roll, and yaw), allowing a system to understand its orientation in space. It is often used in aviation, UAVs, robotics, and marine systems to provide accurate attitude and heading data, which is critical for vehicle control and stabilization.
A INS not only provides orientation data (like an AHRS) but also tracks a vehicle’s position, velocity, and acceleration over time. It uses inertial sensors to estimate movement in 3D space without relying on external references like GNSS. It combines the sensors found in AHRS (gyroscopes, accelerometers) but may also include more advanced algorithms for position and velocity tracking, often integrating with external data like GNSS for enhanced accuracy.
In summary, AHRS focuses on orientation (attitude and heading), while INS provides a full suite of navigational data, including position, velocity, and orientation.
What is the difference between IMU and INS?
The difference between an Inertial Measurement Unit (IMU) and an Inertial Navigation System (INS) lies in their functionality and complexity.
An IMU (inertial measuring unit) provides raw data on the vehicle’s linear acceleration and angular velocity, measured by accelerometers and gyroscopes. It supplies information on roll, pitch, yaw, and motion, but does not compute position or navigation data. The IMU is specifically designed to relay essential data about movement and orientation for external processing to determine position or velocity.
On the other hand, an INS (inertial navigation system) combines IMU data with advanced algorithms to calculate a vehicle’s position, velocity, and orientation over time. It incorporates navigation algorithms like Kalman filtering for sensor fusion and integration. An INS supplies real-time navigation data, including position, velocity, and orientation, without relying on external positioning systems like GNSS.
This navigation system is typically utilized in applications that require comprehensive navigation solutions, particularly in GNSS-denied environments, such as military UAVs, ships, and submarines.
How can I combine inertial systems with a LIDAR for drone mapping?
Combining SBG Systems’ inertial systems with LiDAR for drone mapping enhances accuracy and reliability in capturing precise geospatial data.
Here’s how the integration works and how it benefits drone-based mapping:
- A remote sensing method that uses laser pulses to measure distances to the Earth’s surface, creating a detailed 3D map of the terrain or structures.
- SBG Systems INS combines an Inertial Measurement Unit (IMU) with GNSS data to provide accurate positioning, orientation (pitch, roll, yaw), and velocity, even in GNSS-denied environments.
SBG’s inertial system is synchronized with the LiDAR data. The INS accurately tracks the drone’s position and orientation, while the LiDAR captures the terrain or object details below.
By knowing the precise orientation of the drone, the LiDAR data can be accurately positioned in 3D space.
The GNSS component provides global positioning, while the IMU offers real-time orientation and movement data. The combination ensures that even when the GNSS signal is weak or unavailable (e.g., near tall buildings or dense forests), the INS can continue to track the drone’s path and position, allowing for consistent LiDAR mapping.
What is an indoor positioning system?
An Indoor Positioning System (IPS) is a specialized technology that accurately identifies the locations of objects or individuals within enclosed spaces, such as buildings, where GNSS signals may be weak or non-existent. IPS employs various techniques to deliver precise positioning information in settings like shopping malls, airports, hospitals, and warehouses.
IPS can leverage several technologies for location determination, including:
- Wi-Fi: Utilizes signal strength and triangulation from multiple access points for position estimation.
- Bluetooth Low Energy (BLE): Employs beacons that send signals to nearby devices for tracking.
- Ultrasound: Uses sound waves for accurate location detection, often with mobile device sensors.
- RFID (Radio-Frequency Identification): Involves tags placed on items for real-time tracking.
- Inertial Measurement Units (IMUs): These sensors monitor motion and orientation, enhancing positional accuracy when combined with other methods.
A detailed digital map of the indoor space is essential for accurate positioning, while mobile devices or specialized equipment collect signals from the positioning infrastructure.
IPS enhances navigation, tracks assets, assists emergency services, analyzes retail behavior, and integrates into smart building systems, significantly improving operational efficiency where traditional GNSS fails.