Compact inertial navigation system used for autonomous navigation
Autonomous navigation in autonomous robot, based on odometry fused with Ellipse-A AHRS, and corrected by LiDAR
“With this winning combination, VIKINGS team reaches a centimeter-level absolute precision (< 3 cm), a technical achievement, which has greatly contributed to their two victories.” | Mr. Merriaux
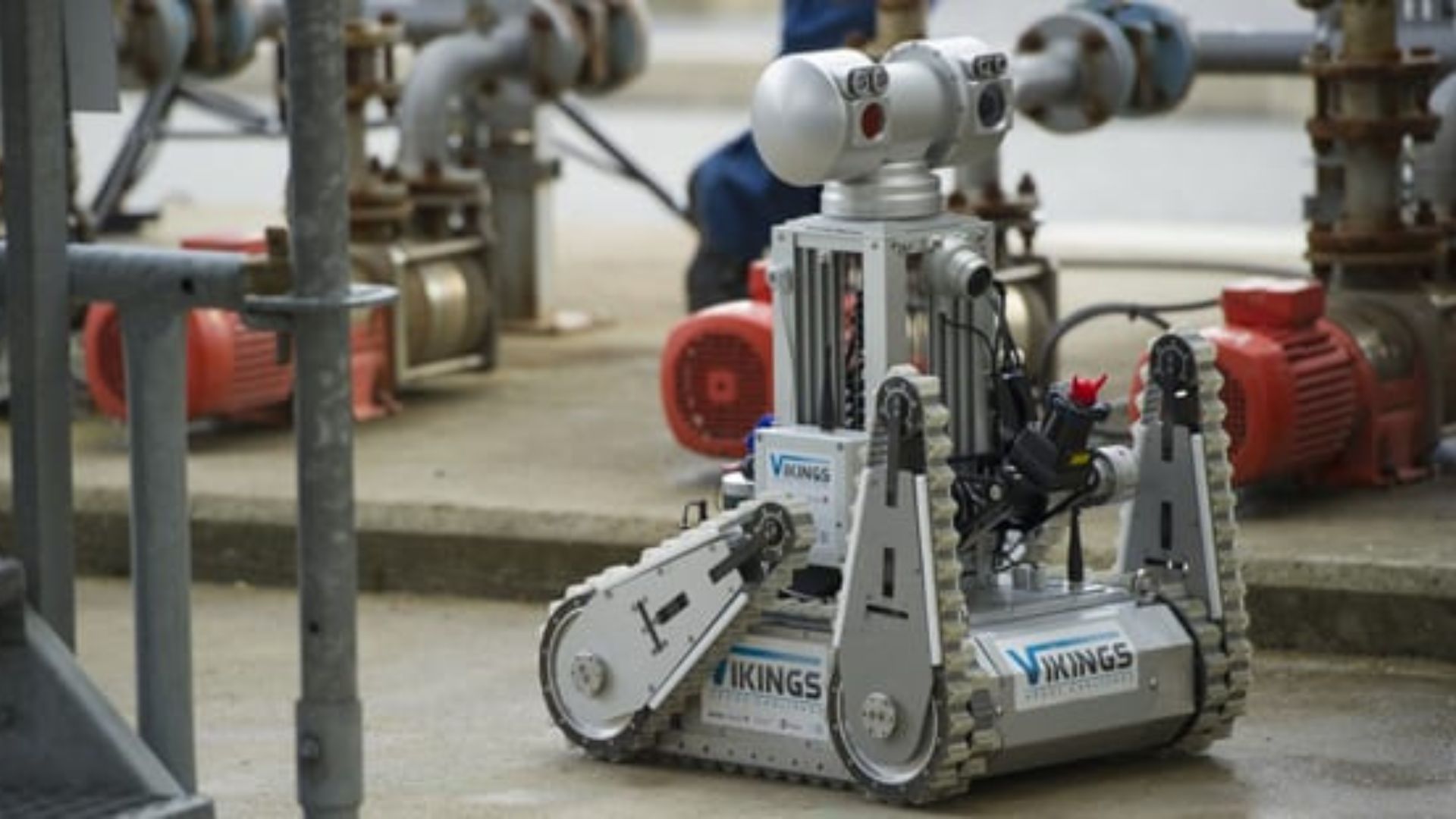
Autonomous robot for oil & gas sites
Launched in December 2013, the ARGOS (Autonomous Robot for Gas and Oil Sites) Challenge is organized by the oil and gas company TOTAL with the French National Research Agency (ANR).
It aims to bring out in less than three years a new generation of autonomous robots able to perform inspection tasks, detect anomalies and respond to emergencies. The objective of this competition is to build an autonomous robot capable of moving on oil and gas sites in order to enhance the security of TOTAL operators.
Data fusion from multiple sensors
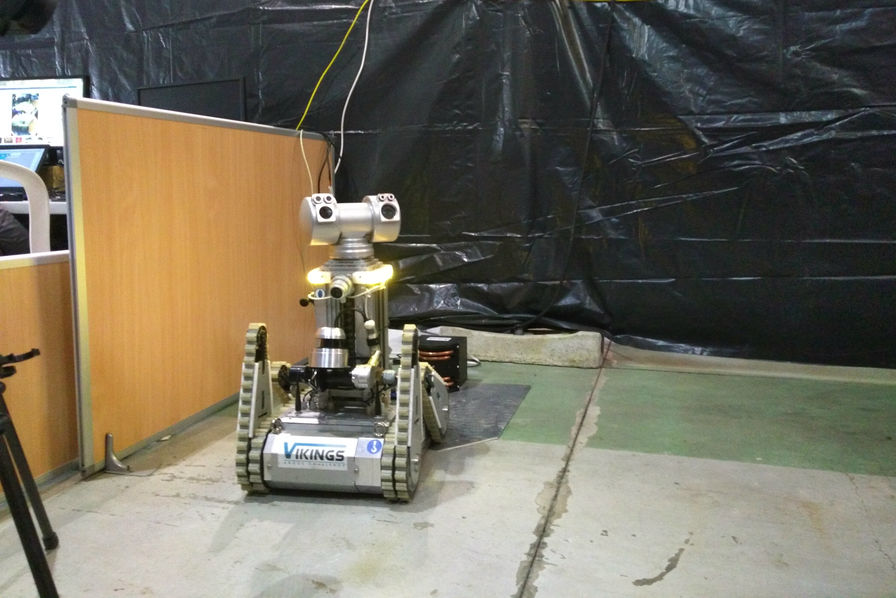
VIKINGS’s robot computes its position thanks to the fusion of odometry prediction and inertial sensor data. This information is then corrected with data from the two LiDAR (the first one is positioned in the front and the other one in the back, for a field-of-view of 360 °).
The robot is equipped with caterpillars, so the robot slides when it rotates. This type of vehicle makes the odometry accuracy especially bad. The inertial system is therefore essential to calculate the heading. Roll and pitch are obtained from the Ellipse-A and fully entrusted.
Reaching the centimeter-level position
Already satisfied with SBG SYSTEMS’ products, the choice was naturally the Ellipse-A attitude and heading reference system. “It provides very good pitch and roll performance thanks to low drift gyros” says Mr. Merriaux.
The Ellipse-A is the second generation of miniature inertial sensors of SBG Systems. It integrates low drift gyroscopes and benefits from the experience gained in algorithms design. Industrial-grade, the Ellipse-A is factory calibrated in temperature and dynamics, ensuring data integrity from -40 to 75 ° C. With this winning combination, VIKINGS team reaches a centimeter level absolute precision (< 3 cm), a technical achievement, which has greatly contributed to their two victories.
“The Ellipse-A provides very good pitch and roll performance thanks to low drift gyros” | Mr. Merriaux


Ellipse-A
Ellipse-A is an affordable and high-performance Attitude and Heading Reference System (AHRS). It embeds a best-in-class magnetic calibration procedure for optimal heading, and is suitable for low to medium dynamic applications.
Factory calibrated from -40°C to 85°C, this robust inertial motion sensor provides Roll, Pitch, Heading, and Heave data.

Ask a quotation for Ellipse-A
Do you have questions?
Welcome to our FAQ section! Here, you’ll find answers to the most common questions about the applications we showcase. If you don’t find what you’re looking for, feel free to contact us directly!
What is the difference between AHRS and INS?
The main difference between an Attitude and Heading Reference System (AHRS) and an Inertial Navigation System (INS) lies in their functionality and the scope of the data they provide.
AHRS provides orientation information—specifically, the attitude (pitch, roll) and heading (yaw) of a vehicle or device. It typically uses a combination of sensors, including gyroscopes, accelerometers, and magnetometers, to calculate and stabilize the orientation. The AHRS outputs the angular position in three axes (pitch, roll, and yaw), allowing a system to understand its orientation in space. It is often used in aviation, UAVs, robotics, and marine systems to provide accurate attitude and heading data, which is critical for vehicle control and stabilization.
A INS not only provides orientation data (like an AHRS) but also tracks a vehicle’s position, velocity, and acceleration over time. It uses inertial sensors to estimate movement in 3D space without relying on external references like GNSS. It combines the sensors found in AHRS (gyroscopes, accelerometers) but may also include more advanced algorithms for position and velocity tracking, often integrating with external data like GNSS for enhanced accuracy.
In summary, AHRS focuses on orientation (attitude and heading), while INS provides a full suite of navigational data, including position, velocity, and orientation.
What is Precise Point Positioning?
Precise Point Positioning (PPP) is a satellite navigation technique that offers high-precision positioning by correcting satellite signal errors. Unlike traditional GNSS methods, which often rely on ground-based reference stations (like in RTK), PPP utilizes global satellite data and advanced algorithms to provide accurate location information.
PPP works anywhere in the world without the need for local reference stations. This makes it suitable for applications in remote or challenging environments where ground infrastructure is lacking. By using precise satellite orbit and clock data, along with corrections for atmospheric and multipath effects, PPP minimizes common GNSS errors and can achieve centimeter-level accuracy.
While PPP can be used for post-processed positioning, which involves analyzing collected data after the fact, it can also provide real-time positioning solutions. Real-time PPP (RTPPP) is increasingly available, allowing users to receive corrections and determine their position in real time.